1. Introduzione
This manual provides essential information for the proper installation, operation, and maintenance of your STEPPERONLINE Nema 17 Bipolar Stepper Motor, model 17HM19-1684S. This high-precision motor is designed for applications requiring accurate positioning and controlled movement, such as 3D printers, CNC machines, and robotics.
Importante avviso di sicurezza:
Always ensure the motor is connected to a constant current or chopper drive controller before testing. Connecting the motor directly to a power supply will cause irreversible damage to the motor.

Figure 1: STEPPERONLINE Nema 17 Bipolar Stepper Motor (Model 17HM19-1684S)
2. Prodotto finitoview
The 17HM19-1684S is a Nema 17 bipolar stepper motor featuring a 0.9-degree step angle, resulting in 400 steps per revolution for enhanced precision. Each phase draws 1.68A, providing a holding torque of 44 Ncm (62.3 oz.in). Its robust construction with alloy steel, aluminum, copper, and metal components ensures durability and reliable performance.
Caratteristiche principali:
- Fine Resolution: 0.9-degree step angle (400 steps/revolution) for precise control.
- High Holding Torque: 44 Ncm (62.3 oz.in) to maintain position under load.
- Standard Nema 17 Frame: 42 x 42mm (1.65" x 1.65") for broad compatibility.
- Bipolar 4-Wire Configuration: Simple and effective wiring.
- Corrente nominale: 1.68A per phase.
3. Specifiche
Specifiche elettriche:
| Parametro | Valore |
|---|---|
| Tipo di motore | Bipolar Stepper |
| Angolo di passo | 0.9 gradi. |
| Tenendo coppia | 44 Ncm (62.3 oz.in) |
| Rated Current/Phase | 1.68 A |
| Resistenza di fase | 1.65 ohm |
| Induttanza | 4.1 mH +/- 20% (1 KHz) |
| Voltage | 12 Volt (nominali) |
| Velocità | 400 giri/min (massimo) |
Specifiche fisiche:
| Parametro | Valore |
|---|---|
| Dimensioni del telaio | 42 x 42 mm (1.65" x 1.65") |
| Lunghezza del corpo | 47 millimetri |
| Diametro dell'albero | 5 millimetri |
| Lunghezza dell'albero | 20 millimetri |
| D-cut Length | 15 millimetri |
| Numero di lead | 4 |
| Lunghezza del cavo | 500 millimetri |
| Peso | 370 g (12.64 once) |
| Materiale | Alloy Steel, Aluminum, Copper, Metal |
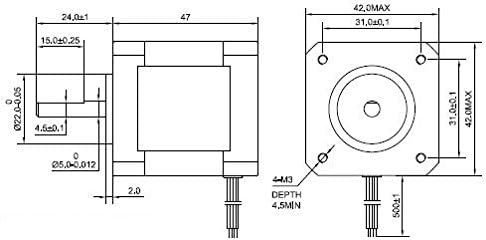
Figure 2: Mechanical Dimensions of the 17HM19-1684S Stepper Motor
4. Configurazione e cablaggio
4.1. Montaggio del motore
Securely mount the stepper motor to your application's frame using appropriate screws through the mounting holes on the motor's front face. Ensure the motor is firmly attached to prevent vibrations and misalignment during operation.
4.2. Collegamenti elettrici
The 17HM19-1684S is a bipolar stepper motor with 4 leads. Correct wiring to a compatible stepper motor driver is crucial for proper function. Refer to the diagram below for the standard connection scheme:
- Nero: A+
- Verde: A-
- Rosso: B+
- Blu: B-

Figure 3: Motor Wiring Diagram and Step Sequence
Reminder: Connect the motor only to a constant current or chopper drive controller. Direct connection to a power supply will damage the motor.
5. Principi operativi
Stepper motors operate by converting digital pulses into discrete mechanical rotational steps. The 0.9-degree step angle means the motor shaft rotates 0.9 degrees for each pulse received by the driver. To achieve continuous rotation, the motor driver sequences the current through the motor's coils in a specific order.
5.1. Driver Compatibility
This motor requires a bipolar stepper motor driver capable of supplying 1.68A per phase. Ensure your chosen driver is compatible with Nema 17 motors and can handle the motor's current and voltage requirements. Microstepping capabilities of the driver can further increase the motor's resolution and reduce vibration.
5.2. Caratteristiche delle prestazioni
The pull-out torque curve illustrates the motor's ability to maintain torque at various speeds. Understanding this curve is essential for optimizing your application's performance, ensuring the motor can deliver the required torque at the desired operating speed.

Figure 4: Pull-out Torque vs. Speed for 17HM19-1684S
6. Manutenzione
Stepper motors are generally low-maintenance devices. However, periodic checks can extend their lifespan and ensure optimal performance:
- Pulizia: Keep the motor free from dust, debris, and moisture. Accumulation can affect cooling and potentially damage internal components.
- Connessioni: Periodically inspect wiring connections for looseness or corrosion. Secure all connections to prevent intermittent operation.
- Montaggio: Verify that the motor remains securely mounted. Loose mounting can lead to vibration, noise, and reduced performance.
- Allineamento dell'albero: Ensure the motor shaft is properly aligned with any connected components (e.g., lead screws, pulleys) to avoid excessive stress on the motor bearings.
- Temperatura: Monitor the motor's operating temperature. Excessive heat can indicate an issue with the driver settings, load, or cooling.
7. Risoluzione Dei Problemi
If you encounter issues with your stepper motor, consider the following common troubleshooting steps:
| Problema | Possibile causa | Soluzione |
|---|---|---|
| Motor does not move or vibrates erratically | Incorrect wiring, insufficient current, driver misconfiguration, excessive load. | Check wiring against diagram. Verify driver current settings. Reduce load. Ensure driver is enabled. |
| Motor loses steps or stalls | Too high speed for load, insufficient current, excessive load, mechanical binding. | Reduce acceleration/speed. Increase driver current (within motor limits). Check for mechanical obstructions. |
| Il motore gira a caldo | Driver current too high, prolonged high load, inadequate cooling. | Reduce driver current. Ensure proper ventilation. Consider a heatsink if necessary. |
| Il motore fa un rumore insolito | Loose mounting, mechanical resonance, driver issues. | Tighten mounting screws. Adjust microstepping settings. Check driver for faults. |
8. Garanzia e supporto
For warranty information and technical support, please refer to the official STEPPERONLINE webo contattare il distributore autorizzato. Conservare la ricevuta d'acquisto per eventuali reclami in garanzia.