OMS-5DE0E9097E18A6B8D86E172AECF57B38
Manuale utente del controller di volo ad ala fissa Omons SpeedyBee F405 WING APP
Model: OMS-5DE0E9097E18A6B8D86E172AECF57B38
1. Introduzione
Il controller di volo Omons SpeedyBee F405 WING APP è un'unità di controllo ad alte prestazioni progettata per velivoli ad ala fissa. Supporta sia il firmware Ardupilot che INAV, offrendo versatilità per diverse applicazioni di volo. Questo controller di volo integra funzionalità essenziali per un volo stabile e affidabile, tra cui il supporto della telemetria CRSF per la trasmissione avanzata dei dati.
Questo manuale fornisce istruzioni dettagliate per la configurazione, il funzionamento e la manutenzione del tuo SpeedyBee F405 WING APP Flight Controller per garantire prestazioni ottimali e longevità.
2. Configurazione e installazione
2.1 Installazione fisica
Montare con cura il controller di volo SpeedyBee F405 WING APP sul vostro velivolo ad ala fissa, assicurandosi che sia fissato saldamente e isolato dalle vibrazioni. Rispettare l'orientamento corretto in base ai requisiti del firmware scelto (Ardupilot o INAV).
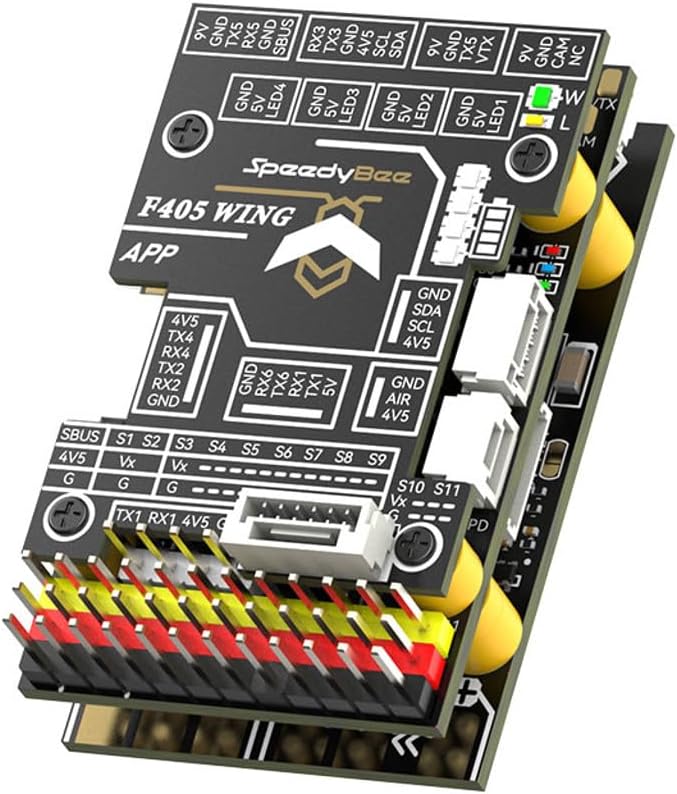
Figura 2.1: in alto view del controller di volo SpeedyBee F405 WING APP, evidenziando i vari pin di input/output e i connettori per le periferiche.
2.2 Collegamenti di cablaggio
Collegare l'alimentazione, gli ESC, i servi, il ricevitore, il GPS e le altre periferiche secondo gli schemi di pinout specifici dell'app F405 WING. Assicurarsi che la polarità di tutti i collegamenti sia corretta per evitare danni.
- Potenza in ingresso: Collegare la batteria principale (7-36 V CC) ai pad BAT+/BAT- nella sezione Power Distribution Board (PDB).
- ESC/servi: Collegare i cavi del segnale ESC e i cavi del servo ai pin di uscita S1-S11 designati.
- Ricevitore: Collega il tuo ricevitore (ad esempio, SBUS, CRSF) ai pad RX/TX appropriati. È supportata la telemetria CRSF.
- GPS/Bussola: Collegare i moduli GPS e bussola esterna alle porte UART dedicate (ad esempio, TX/RX, SDA/SCL).
- VTX/Telecamera: Utilizzare le uscite dedicate da 9 V o 5 V per l'alimentazione del trasmettitore video (VTX) e della telecamera.

Figura 2.2: Esampschema elettrico che mostra i collegamenti tipici per il controller di volo SpeedyBee F405 WING APP.
2.3 Aggiornamento e configurazione del firmware
L'app SpeedyBee F405 WING supporta i firmware Ardupilot e INAV. Scarica l'ultimo firmware stabile per la tua piattaforma preferita dal sito ufficiale. websiti.
- Collega il flight controller al tuo computer tramite USB.
- Utilizzare il rispettivo software di configurazione (Ardupilot Mission Planner o INAV Configurator) per aggiornare il firmware.
- Eseguire la configurazione iniziale e la calibrazione, inclusa la calibrazione dell'accelerometro, della bussola e della radio.
- Configurare le modalità di volo, le impostazioni di sicurezza e l'OSD (On-Screen Display), se applicabile.
3. Istruzioni per l'uso
Una volta installato e configurato il flight controller, seguire queste linee guida operative generali:
- Controlli pre-volo: Prima di ogni volo, verificare che tutte le superfici di controllo si muovano correttamente, la tensione della batteriatage è adeguato e il blocco GPS (se utilizzato) è acquisito.
- Armamento: Armare l'aereo utilizzando il comando o l'interruttore configurato. Assicurarsi che le eliche siano libere prima di armare.
- Modalità di volo: Utilizzare le modalità di volo configurate (ad esempio, Manuale, Stabilizzazione, RTH - Ritorno a casa) in base alle proprie esigenze di volo.
- telemetria: Monitora i dati di volo tramite la telemetria CRSF sul tuo sistema radio compatibile. Questo fornisce informazioni in tempo reale come il livello della batteriatage, coordinate GPS e modalità di volo.
- Disinserimento: Disattivare l'aereo dopo l'atterraggio per evitare la rotazione accidentale dell'elica.
4. Manutenzione
Una manutenzione regolare garantisce la longevità e l'affidabilità del tuo controllore di volo:
- Ispezione: Ispezionare periodicamente la scheda per verificare la presenza di danni fisici, collegamenti allentati o segni di corrosione.
- Pulizia: Pulisci delicatamente la scheda con una spazzola morbida o aria compressa per rimuovere polvere e detriti. Evita l'uso di liquidi.
- Aggiornamenti del firmware: Controlla e applica regolarmente gli aggiornamenti del firmware per Ardupilot o INAV per beneficiare di nuove funzionalità, correzioni di bug e miglioramenti delle prestazioni.
- Magazzinaggio: Quando non viene utilizzato, conservare il controller di volo in un ambiente asciutto e antistatico.
5. Risoluzione Dei Problemi
Se riscontri problemi con il tuo SpeedyBee F405 WING APP Flight Controller, tieni presente quanto segue:
| Problema | Possibile causa | Soluzione |
|---|---|---|
| Nessuna alimentazione per FC | Cablaggio errato, fonte di alimentazione difettosa, scheda danneggiata. | Verificare il collegamento e la polarità della batteria. Verificare la presenza di cortocircuiti. Ispezionare la scheda per verificare la presenza di danni visibili. |
| Nessuna connessione al configuratore | Driver USB errato, cavo USB difettoso, FC non in modalità DFU. | Installa i driver corretti. Prova un cavo/porta USB diverso. Metti FC in modalità DFU (consulta la documentazione del firmware). |
| I motori non si armano | Funzionalità di sicurezza attivate (ad esempio, nessun aggancio GPS, batteria scarica, acceleratore troppo alto, controlli pre-armamento falliti). | Controllare i messaggi OSD o il configuratore per gli avvisi di pre-armamento. Assicurarsi che tutte le condizioni di sicurezza siano soddisfatte. Calibrare gli ESC. |
| Comportamento di volo irregolare | Calibrazione errata del sensore, vibrazioni, regolazione PID errata. | Ricalibrare l'accelerometro e la bussola. Assicurarsi che la FC sia isolata dalle vibrazioni. Regolare con cautela le impostazioni PID. |
Per una risoluzione dei problemi più dettagliata, fare riferimento alla documentazione ufficiale del firmware Ardupilot o INAV, poiché molti problemi sono specifici del firmware.
6. Specifiche
Specifiche principali per il controller di volo Omons SpeedyBee F405 WING APP:
| Caratteristica | Dettaglio |
|---|---|
| Modello | APP F405 ALA |
| Numero di parte | OMS-5DE0E9097E18A6B8D86E172AECF57B38 |
| Firmware supportato | Ardupilot, INAV |
| Ingresso volumetage | 7-36 V CC (2-8S LiPo) |
| Sensore di corrente | Massimo 215A |
| Uscita BEC 9V | 2A per VTX, telecamera, giunto cardanico; 1.8A (predefinito) / 4.5A (selezionabile) per i servocomandi |
| Uscita BEC 5V | 2A per FC e periferiche; 5A (predefinito) / 7.2A (selezionabile) per servocomandi |
| Supporto telemetrico | Telemetria CRSF |
| Materiale | Metallo (componenti PCB) |
| Data prima disponibilità | 11 luglio 2024 |

Figura 6.1: In basso view del controllore di volo, che dettaglia le specifiche PDB dell'F405-WING con volume di inputtagspecifiche di uscita e e BEC.
7. Garanzia e supporto
Per informazioni sulla garanzia e supporto tecnico, fare riferimento al sito ufficiale websito web del produttore o contattare il rivenditore. Assicurarsi di conservare la prova d'acquisto per eventuali reclami in garanzia.
Anche i forum della community e le risorse online per Ardupilot e INAV sono ottime fonti di supporto e guide di configurazione avanzate.
Ask a question about this manual
Ask about setup, troubleshooting, compatibility, parts, safety, or missing instructions. Manuals+ will review the question and use this page’s manual context to help answer it.