Modulo di ingresso o uscita EMKO PROOP

Prefazione
Il modulo Proop-I/O viene utilizzato con il dispositivo Prop. Può anche essere utilizzato come percorso dati per qualsiasi marchio. Questo documento sarà utile all'utente per installare e collegare il modulo Proop-I/O.
- Prima di iniziare l'installazione di questo prodotto, leggere il manuale di istruzioni.
- Il contenuto del documento potrebbe essere stato aggiornato. Puoi accedere alla versione più aggiornata su www.emkoelektronik.com.tr
- Questo simbolo viene utilizzato per gli avvisi di sicurezza. L'utente deve prestare attenzione a questi avvisi.
Condizioni ambientali
| Temperatura di esercizio : | 0-50 °C |
| Umidità massima: | 0-90 %UR (nessuna condensa) |
| Peso : | 238gr |
| Dimensione : | Dimensioni: 160 x 90 x 35 mm |
Caratteristiche
I moduli Proop-I/O si dividono in diverse tipologie in base a ingressi-uscite. I tipi sono i seguenti.
| Tipo di prodotto
Proop-I/OP |
A |
. |
B |
. |
C |
. |
D |
. |
E |
. |
F |
| 2 | 2 | 1 | 3 | ||||||||
| Fornitura di moduli | |||||||||||
| 24 Vdc/Vac (isolamento) | 2 | |||
| Comunicazione | ||||
| RS-485 (isolamento) | 2 | |||
| Ingressi digitali | ||||
| 8x Digital | 1 | |||
| Uscite digitali | ||||
| Transistor 8x 1A (+V) | 3 | |||
| Ingressi analogici | ||||
| 5x Pt-100 (-200…650°C)
5x 0/4..20mAdc 5x 0…10Vdc 5x 0…50 mV |
1 | ||
| 2 | |||
| 3 | |||
| 4 | |||
| Uscite analogiche | |||
| 2x 0/4…20mAcc
2x 0…10Vcc |
1 | ||
| 2 | |||
Dimensioni
Montaggio del modulo sul dispositivo Proop
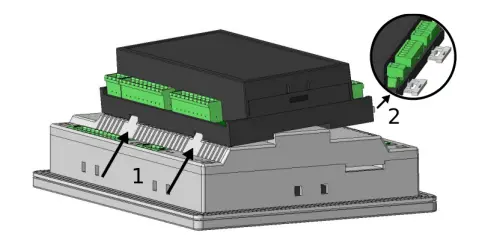 |
1- Inserire il modulo Prop I/O nei fori del dispositivo Prop come nell'immagine.
2- Verificare che le parti di bloccaggio siano inserite nel dispositivo Proop-I/O Module ed estratte. |
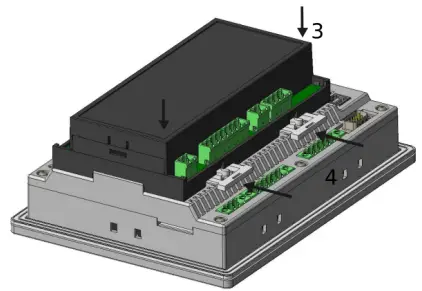 |
3- Premere con decisione il dispositivo Proop-I/O Module nella direzione specificata.
4- Inserire le parti di bloccaggio spingendole all'interno. |
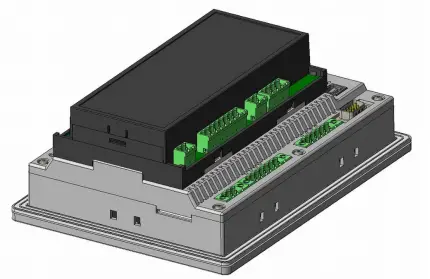 |
5- L'immagine inserita del dispositivo del modulo dovrebbe essere simile a quella a sinistra. |
Montaggio del modulo su DIN-Ray
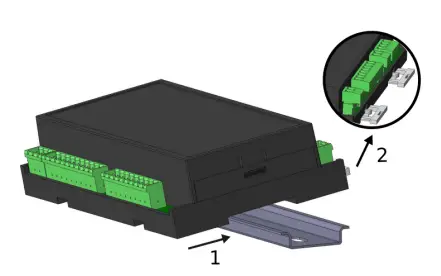 |
1- Trascinare il dispositivo Proop-I/O Module sul raggio DIN come mostrato.
2- Verificare che le parti di bloccaggio siano inserite nel dispositivo Prop-I/O Module ed estratte. |
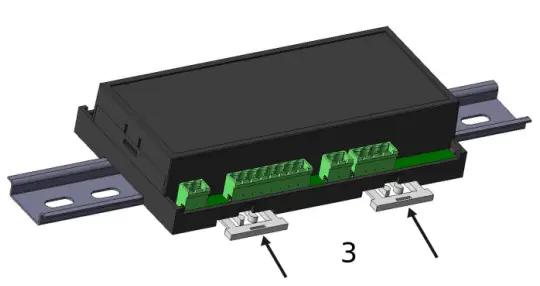 |
3- Inserire le parti di bloccaggio spingendole all'interno. |
 |
4- L'immagine inserita del dispositivo del modulo dovrebbe essere simile a quella a sinistra. |
Installazione
- Prima di iniziare l'installazione di questo prodotto, leggere attentamente il manuale di istruzioni e le avvertenze riportate di seguito.
- Si consiglia un'ispezione visiva di questo prodotto per eventuali danni verificatisi durante la spedizione prima dell'installazione. È tua responsabilità assicurarti che tecnici meccanici ed elettrici qualificati installino questo prodotto.
- Non utilizzare l'unità in atmosfere combustibili o gassose esplosive.
- Non esporre l'unità ai raggi diretti del sole o ad altre fonti di calore.
- Non posizionare l'unità in prossimità di apparecchiature magnetiche come trasformatori, motori o dispositivi che generano interferenze (saldatrici, ecc.)
- Per ridurre l'effetto del rumore elettrico sul dispositivo, Low voltagIl cablaggio della linea (soprattutto il cavo di ingresso del sensore) deve essere separato dall'alta corrente e dal voltage linea.
- Durante l'installazione dell'apparecchiatura nel pannello, gli spigoli vivi sulle parti metalliche possono causare tagli alle mani, prestare attenzione.
- Il montaggio del prodotto deve essere effettuato con il proprio montaggio clamps.
- Non montare il dispositivo con clampS. Non far cadere il dispositivo durante l'installazione.
- Se possibile, utilizzare cavo schermato. Per evitare loop di terra, la schermatura deve essere collegata a terra solo su un'estremità.
- Per evitare scosse elettriche o danni al dispositivo, non alimentare il dispositivo fino a quando tutto il cablaggio non è stato completato.
- Le uscite digitali e le connessioni di alimentazione sono progettate per essere isolate l'una dall'altra.
- Prima della messa in servizio del dispositivo, i parametri devono essere impostati in base all'uso desiderato.
- Una configurazione incompleta o errata può essere pericolosa.
- L'unità viene normalmente fornita senza interruttore di alimentazione, fusibile o interruttore automatico. Utilizzare un interruttore di alimentazione, un fusibile e un interruttore automatico come richiesto dalle normative locali.
- Applicare solo l'alimentazione nominale voltage all'unità, per evitare danni alle apparecchiature.
- Se esiste il pericolo di gravi incidenti derivanti da un guasto o un difetto di questa unità, spegnere il sistema e scollegare il dispositivo dal sistema.
- Non tentare mai di smontare, modificare o riparare questa unità. TampL'uso dell'unità può causare malfunzionamenti, scosse elettriche o incendi.
- Vi preghiamo di contattarci per qualsiasi domanda relativa al funzionamento sicuro di questa unità.
- Questa apparecchiatura deve essere utilizzata nel modo specificato in questo manuale di istruzioni.
Connessioni
Alimentazione elettrica
 |
terminale |
| + | |
|
– |
Collegamento di comunicazione con il dispositivo HMI
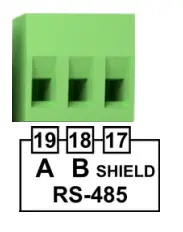 |
terminale |
| A | |
| B | |
| Terra |
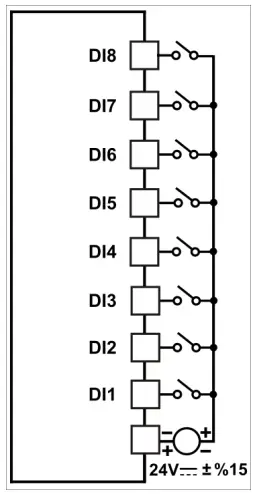
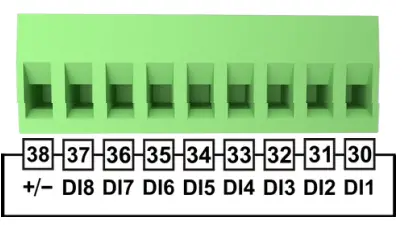
Ingressi digitali
|
|
terminale | Commento | Schema di connessione |
| DI8 |
Ingressi digitali |
 |
|
| DI7 | |||
| DI6 | |||
| DI5 | |||
| DI4 | |||
| DI3 | |||
| DI2 | |||
| DI1 | |||
|
+/- |
NPN/PNP
Selezione degli ingressi digitali |
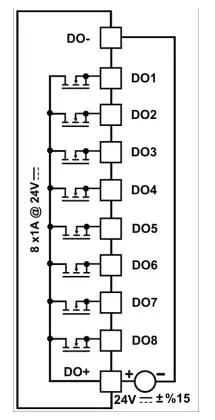
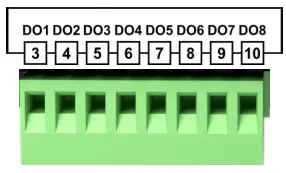
Uscite digitali
|
|
terminale | Commento | Schema di connessione |
| DO1 |
Uscite digitali |
 |
|
| DO2 | |||
| DO3 | |||
| DO4 | |||
| DO5 | |||
| DO6 | |||
| DO7 | |||
| DO8 |
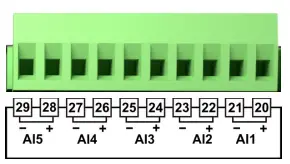
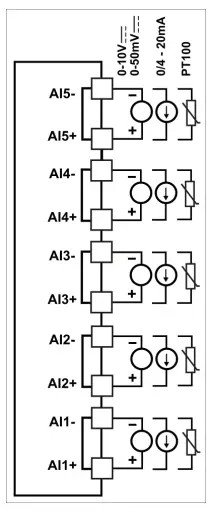
Ingressi analogici
|
terminale | Commento | Schema di connessione |
| AI5- |
Ingresso analogico5 |
 |
|
| IA5+ | |||
| AI4- |
Ingresso analogico4 |
||
| IA4+ | |||
| AI3- |
Ingresso analogico3 |
||
| IA3+ | |||
| AI2- |
Ingresso analogico2 |
||
| IA2+ | |||
| AI1- |
Ingresso analogico1 |
||
| IA1+ |
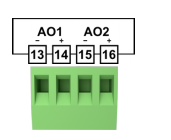
Uscite analogiche
|
|
terminale | Commento | Schema di connessione |
|
AO+ |
Alimentazione uscita analogica |
 |
|
|
AO- |
|||
|
AO1 |
Uscite analogiche |
||
|
AO2 |
Caratteristiche tecniche
Alimentazione elettrica
| Alimentazione elettrica | : | 24 V CC |
| Intervallo consentito | : | 20.4 – 27.6 VCC |
| Consumo energetico | : | 3W |
Ingressi digitali
| Ingressi digitali | : | 8 Ingresso | |
| Ingresso nominale Voltage | : | 24 VCC | |
|
Ingresso volumetage |
: |
Per Logica 0 | Per Logica 1 |
| < 5 VCC | >10 V c.c | ||
| Corrente di ingresso | : | 6mA max. | |
| Impedenza di ingresso | : | 5.9 kΩ | |
| Tempo di risposta | : | da '0' a '1' 50ms | |
| Isolamento galvanico | : | 500 V CA per 1 minuto | |
Ingressi contatore ad alta velocità
| Ingressi HSC | : | 2 ingressi (HSC1: DI1 e DI2, HSC2: DI3 e DI4) | |
| Ingresso nominale Voltage | : | 24 VCC | |
|
Ingresso volumetage |
: |
Per Logica 0 | Per Logica 1 |
| < 10 VCC | >20 V c.c | ||
| Corrente di ingresso | : | 6mA max. | |
| Impedenza di ingresso | : | 5.6 kΩ | |
| Gamma di frequenza | : | 15KHz max. per monofase 10KHz max. per doppia fase | |
| Isolamento galvanico | : | 500 V CA per 1 minuto | |
Uscite digitali
| Uscite digitali | uscita 8 | |
| Uscite in corrente | : | 1 A max. (Corrente totale 8 A max.) |
| Isolamento galvanico | : | 500 V CA per 1 minuto |
| Protezione da cortocircuito | : | SÌ |
Ingressi analogici
| Ingressi analogici | : | 5 Ingresso | |||
|
Impedenza di ingresso |
: |
PT-100 | 0/4-20mA | 0-10 V | 0-50mV |
| -200oC-650oC | 100Ω | >6.6kΩ | >10 MΩ | ||
| Isolamento galvanico | : | NO | |||
| Risoluzione | : | 14 bit | |||
| Precisione | : | ±0,25% | |||
| Sampling tempo | : | 250 millisecondi | |||
| Indicazione di stato | : | SÌ | |||
Uscite analogiche
|
Uscita analogica |
: |
uscita 2 | |
| 0/4-20mA | 0-10 V | ||
| Isolamento galvanico | : | NO | |
| Risoluzione | : | 12 bit | |
| Precisione | : | 1% della scala completa | |
Definizioni di indirizzi interni
Impostazioni di comunicazione:
| Parametri | Indirizzo | Opzioni | Predefinito |
| ID | 40001 | Numero di telefono: 1–255 | 1 |
| BAUDRATE | 40002 | 0- 1200 / 1- 2400 / 2- 4000 / 3- 9600 / 4- 19200 / 5- 38400 /
6-57600/7-115200 |
6 |
| ARRESTO BIT | 40003 | 0-1Bit / 1-2Bit | 0 |
| PARITÀ | 40004 | 0- Nessuno / 1- Pari / 2- Dispari | 0 |
Indirizzi del dispositivo:
| Memoria | Formato | Arancio | Indirizzo | Tipo |
| Input digitale | DIn | n: 0 – 7 | 10001 – 10008 | Leggere |
| Output digitale | Assistente | n: 0 – 7 | 1 – 8 | Lettura-scrittura |
| Ingresso analogico | In | n: 0 – 7 | 30004 – 30008 | Leggere |
| Uscita analogica | AOn | n: 0 – 1 | 40010 – 40011 | Lettura-scrittura |
| Versione* | (aaabbbbbcccccccc)morso | n: 0 | 30001 | Leggere |
- Nota:I bit a in questo indirizzo sono principali, i bit b sono il numero di versione minore, i bit c indicano il tipo di dispositivo.
- Exampon: Valore letto da 30001 (0x2121)hex = (0010000100100001)bit ,
- a bit (001) bit = 1 (numero di versione principale)
- b bit (00001) bit = 1 (numero di versione minore)
- c bit (00100001)bit = 33 (I tipi di dispositivo sono indicati nella tabella.) Versione dispositivo = V1.1
- Tipo di dispositivo = Ingresso analogico 0-10 V Uscita analogica 0-10 V
Tipi di dispositivi:
| Tipo di dispositivo | Valore |
| Ingresso analogico PT100 Uscita analogica 4-20 mA | 0 |
| Ingresso analogico PT100 Uscita analogica 0-10V | 1 |
| Ingresso analogico 4-20 mA Uscita analogica 4-20 mA | 16 |
| Ingresso analogico 4-20 mA Uscita analogica 0-10 V | 17 |
| Ingresso analogico 0-10 V Uscita analogica 4-20 mA | 32 |
| Ingresso analogico 0-10V Uscita analogica 0-10V | 33 |
| Ingresso analogico 0-50mV Uscita analogica 4-20mA | 48 |
| Ingresso analogico 0-50mV Uscita analogica 0-10V | 49 |
La conversione dei valori letti dal modulo in base al tipo di ingresso analogico è descritta nella seguente tabella:
| Ingresso analogico | La gamma di valori | Conversione Fattore | Example di valore mostrato in PROOP |
|
PT-100 -200° – 650° |
-2000 – 6500 |
numero x10–1 |
Example-1: il valore letto come 100 viene convertito in 10oC. |
| Example-2: il valore letto come 203 viene convertito in 20.3oC. | |||
| 0 – 10V | 0 – 20000 | 0.5×10–3 | Example-1: Il valore letto come 2500 viene convertito in 1.25V. |
| 0 – 50mV | 0 – 20000 | 2.5×10–3 | Example-1: il valore letto come 3000 viene convertito in 7.25 mV. |
|
0/4 – 20mA |
0 – 20000 |
0.1×10–3 |
Example-1: Il valore letto come 3500 viene convertito in 7mA. |
| Example-2: Il valore letto come 1000 viene convertito in 1mA. |
La conversione dei valori scritti sul modulo in base al tipo di uscita analogica è descritta nella tabella seguente:
| Uscita analogica | La gamma di valori | Conversione Valutare | Example di Valore Scritto in Moduli |
| 0 – 10V | 0 – 10000 | numero x103 | Example-1: il valore da scrivere come 1.25 V viene convertito in 1250. |
| 0/4 – 20mA | 0 – 20000 | numero x103 | Example-1: il valore da scrivere come 1.25 mA viene convertito in 1250. |
Indirizzi specifici dell'ingresso analogico:
| Parametro | AI1 | AI2 | AI3 | AI4 | AI5 | Predefinito |
| Configurazione Pezzi | 40123 | 40133 | 40143 | 40153 | 40163 | 0 |
| Valore minimo di scala | 40124 | 40134 | 40144 | 40154 | 40164 | 0 |
| Valore di scala massimo | 40125 | 40135 | 40145 | 40155 | 40165 | 0 |
| Valore ridimensionato | 30064 | 30070 | 30076 | 30082 | 30088 | – |
Bit di configurazione dell'ingresso analogico:
| AI1 | AI2 | AI3 | AI4 | AI5 | Descrizione |
| 40123.0morso | 40133.0morso | 40143.0morso | 40153.0morso | 40163.0morso | 4-20 mA/2-10 V Selezionare:
0 = 0-20 mA/0-10 V 1 = 4-20 mA/2-10 V |
Il valore scalato per gli ingressi analogici viene calcolato in base allo stato del bit di configurazione Selezione 4-20 mA / 2-10 V.
Indirizzi specifici dell'uscita analogica:
| Parametro | AO1 | AO2 | Predefinito |
| Valore di scala minimo per l'input | 40173 | 40183 | 0 |
| Valore di scala massimo per l'input | 40174 | 40184 | 20000 |
| Valore di scala minimo per l'uscita | 40175 | 40185 | 0 |
| Valore di scala massimo per l'uscita | 40176 | 40186 | 10000/20000 |
| Funzione di uscita analogica
0: Uso manuale 1: utilizzando i valori di scala di cui sopra, riflette l'input sull'output. 2: Pilota l'uscita analogica come uscita PID, utilizzando i parametri di scala minimo e massimo per l'uscita. |
40177 | 40187 | 0 |
- Nel caso in cui il parametro della funzione dell'uscita analogica sia impostato su 1 o 2;
- AI1 viene utilizzato come ingresso per l'uscita A01.
- AI2 viene utilizzato come ingresso per l'uscita A02.
- Non: Il mirroring della funzione da ingresso a uscita (funzione di uscita analogica = 1) non può essere utilizzato nei moduli con ingressi PT100.
Impostazioni HSC (contatore ad alta velocità).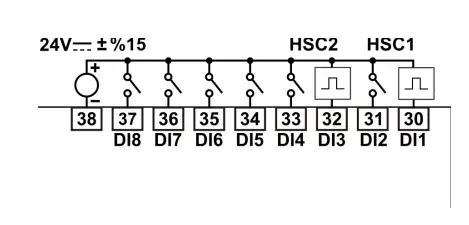
Collegamento contatore monofase
- I contatori ad alta velocità contano gli eventi ad alta velocità che non possono essere controllati alle velocità di scansione PROOP-IO. La frequenza massima di conteggio di un contatore ad alta velocità è 10kHz per gli ingressi Encoder e 15kHz per gli ingressi contatore.
- Esistono cinque tipi base di contatori: contatore monofase con controllo di direzione interno, contatore monofase con controllo di direzione esterno, contatore bifase con 2 ingressi di clock, contatore in quadratura di fase A/B e tipo di misurazione della frequenza.
- Nota che ogni modalità non è supportata da ogni contatore. È possibile utilizzare ogni tipo tranne il tipo di misurazione della frequenza: senza reset o ingressi di avvio, con reset e senza start o con entrambi gli ingressi di start e reset.
- Quando si attiva l'ingresso di reset, cancella il valore corrente e lo mantiene chiaro finché non si disattiva il reset.
- Quando si attiva l'ingresso di start, permette al contatore di contare. Mentre l'avvio è disattivato, il valore corrente del contatore viene mantenuto costante e gli eventi di timbratura vengono ignorati.
- Se il ripristino viene attivato mentre l'avvio non è attivo, il ripristino viene ignorato e il valore corrente non viene modificato. Se l'ingresso di avvio diventa attivo mentre è attivo l'ingresso di ripristino, il valore corrente viene cancellato.
| Parametri | Indirizzo | Predefinito |
| Configurazione HSC1 e selezione modalità* | 40012 | 0 |
| Configurazione HSC2 e selezione modalità* | 40013 | 0 |
| HSC1 Nuovo valore corrente (meno significativo 16 byte) | 40014 | 0 |
| HSC1 Nuovo valore corrente (16 byte più significativo) | 40015 | 0 |
| HSC2 Nuovo valore corrente (meno significativo 16 byte) | 40016 | 0 |
| HSC2 Nuovo valore corrente (16 byte più significativo) | 40017 | 0 |
| Valore corrente HSC1 (16 byte meno significativi) | 30010 | 0 |
| Valore corrente HSC1 (16 byte più significativo) | 30011 | 0 |
| Valore corrente HSC2 (16 byte meno significativi) | 30012 | 0 |
| Valore corrente HSC2 (16 byte più significativo) | 30013 | 0 |
Nota: Questo parametro;
- Il byte meno significativo è il parametro Mode.
- Il byte più significativo è il parametro Configuration.
Descrizione della configurazione HSC:
| HSC1 | HSC2 | Descrizione |
| 40012.8morso | 40013.8morso | Bit di controllo livello attivo per Reset:
0 = il ripristino è attivo basso 1 = il ripristino è attivo alto |
| 40012.9morso | 40013.9morso | Bit di controllo del livello attivo per l'avvio:
0 = Start è attivo basso 1 = Start è attivo alto |
| 40012.10morso | 40013.10morso | Bit di controllo della direzione di conteggio:
0 = conto alla rovescia 1 = conto alla rovescia |
| 40012.11morso | 40013.11morso | Scrivere il nuovo valore corrente nell'HSC:
0 = Nessun aggiornamento 1 = Aggiorna il valore corrente |
| 40012.12morso | 40013.12morso | Abilita l'HSC:
0 = Disabilita l'HSC 1 = Abilita l'HSC |
| 40012.13morso | 40013.13morso | Prenotare |
| 40012.14morso | 40013.14morso | Prenotare |
| 40012.15morso | 40013.15morso | Prenotare |
Modalità HSC:
| Modalità | Descrizione | Ingressi | |||
| HSC1 | DI1 | DI2 | DI5 | DI6 | |
| HSC2 | DI3 | DI4 | DI7 | DI8 | |
| 0 | Contatore monofase con direzione interna | Orologio | |||
| 1 | Orologio | Reset | |||
| 2 | Orologio | Reset | Inizio | ||
| 3 | Contatore monofase con direzione esterna | Orologio | Direzione | ||
| 4 | Orologio | Direzione | Reset | ||
| 5 | Orologio | Direzione | Reset | Inizio | |
| 6 | Contatore a due fasi con 2 ingressi di clock | Orologio in su | Orologio giù | ||
| 7 | Orologio in su | Orologio giù | Reset | ||
| 8 | Orologio in su | Orologio giù | Reset | Inizio | |
| 9 | Contatore encoder di fase A/B | Orologio A | Orologio B | ||
| 10 | Orologio A | Orologio B | Reset | ||
| 11 | Orologio A | Orologio B | Reset | Inizio | |
| 12 | Prenotare | ||||
| 13 | Prenotare | ||||
| 14 | Misura del periodo (con 10 μs samptempo di attesa) | Inserimento periodo | |||
| 15 | Contatore /
Periodo Ölçümü (1ms samptempo di attesa) |
Max. 15kHz | Max. 15kHz | Max. 1kHz | Max. 1kHz |
Indirizzi specifici per la modalità 15:
| Parametro | DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | Predefinito |
| Configurazione Pezzi | 40193 | 40201 | 40209 | 40217 | 40225 | 40233 | 40241 | 40249 | 2 |
| Tempo di reset del periodo (1-1000 sn) |
40196 |
40204 |
40212 |
40220 |
40228 |
40236 |
40244 |
40252 |
60 |
| Valore a 16 bit di ordine basso del contatore | 30094 | 30102 | 30110 | 30118 | 30126 | 30134 | 30142 | 30150 | – |
| Valore a 16 bit di ordine elevato del contatore | 30095 | 30103 | 30111 | 30119 | 30127 | 30135 | 30143 | 30151 | – |
| Periodo valore a 16 bit di ordine inferiore (ms) | 30096 | 30104 | 30112 | 30120 | 30128 | 30136 | 30144 | 30152 | – |
| Periodo valore di ordine elevato a 16 bit (ms) | 30097 | 30105 | 30113 | 30121 | 30129 | 30137 | 30145 | 30153 | – |
Configurazione Pezzi:
| DI1 | DI2 | DI3 | DI4 | DI5 | DI6 | DI7 | DI8 | Descrizione |
| 40193.0morso | 40201.0morso | 40209.0morso | 40217.0morso | 40225.0morso | 40233.0morso | 40241.0morso | 40249.0morso | Bit di abilitazione DIx: 0 = DIx abilitato 1 = DIx disabilitato |
|
40193.1morso |
40201.1morso |
40209.1morso |
40217.1morso |
40225.1morso |
40233.1morso |
40241.1morso |
40249.1morso |
Bit di direzione del conteggio:
0 = conto alla rovescia 1 = conto alla rovescia |
| 40193.2morso | 40201.2morso | 40209.2morso | 40217.2morso | 40225.2morso | 40233.2morso | 40241.2morso | 40249.2morso | Prenotare |
| 40193.3morso | 40201.3morso | 40209.3morso | 40217.3morso | 40225.3morso | 40233.3morso | 40241.3morso | 40249.3morso | Bit di azzeramento conteggio DIx:
1 = Azzera il contatore DIx |
Impostazioni PID
La funzione di controllo PID o On/Off può essere utilizzata impostando i parametri determinati per ciascun ingresso analogico nel modulo. L'ingresso analogico con funzione PID o ON/OFF attivata comanda la corrispondente uscita digitale. L'uscita digitale associata al canale di cui è attivata la funzione PID o ON/OFF non può essere pilotata manualmente.
- L'ingresso analogico AI1 controlla l'uscita digitale DO1.
- L'ingresso analogico AI2 controlla l'uscita digitale DO2.
- L'ingresso analogico AI3 controlla l'uscita digitale DO3.
- L'ingresso analogico AI4 controlla l'uscita digitale DO4.
- L'ingresso analogico AI5 controlla l'uscita digitale DO5.
Parametri PID:
| Parametro | Descrizione |
| PID attivo | Abilita il funzionamento PID o ON/OFF.
0 = Uso manuale 1 = PID attivo 2 = ON/OFF attivo |
| Imposta valore | È il valore impostato per il funzionamento PID o ON/OFF. I valori PT100 possono essere compresi tra -200.0 e 650.0 per input, 0 e 20000 per altri tipi. |
| Imposta offset | Viene utilizzato come valore di offset impostato nel funzionamento PID. Può assumere valori compresi tra -325.0 e
325.0 per ingresso PT100, da -10000 a 10000 per altri tipi. |
| Impostare l'isteresi | Viene utilizzato come valore di impostazione dell'isteresi nel funzionamento ON/OFF. Può assumere valori compresi tra
-325.0 e 325.0 per ingresso PT100, da -10000 a 10000 per altri tipi. |
| Valore minimo di scala | La scala di lavoro è il valore limite inferiore. I valori di PT100 possono essere compresi tra -200.0 e
650.0 per input, 0 e 20000 per altri tipi. |
| Valore di scala massimo | La scala di lavoro è il valore limite superiore. I valori di PT100 possono essere compresi tra -200.0 e
650.0 per input, 0 e 20000 per altri tipi. |
| Valore proporzionale di riscaldamento | Valore proporzionale per il riscaldamento. Può assumere valori compresi tra 0.0 e 100.0. |
| Valore integrale riscaldamento | Valore integrale per il riscaldamento. Può assumere valori compresi tra 0 e 3600 secondi. |
| Valore della derivata del riscaldamento | Valore derivato per il riscaldamento. Può assumere valori compresi tra 0.0 e 999.9. |
| Valore proporzionale del raffreddamento | Valore proporzionale per il raffreddamento. Può assumere valori compresi tra 0.0 e 100.0. |
| Valore integrale di raffreddamento | Valore integrale per il raffreddamento. Può assumere valori compresi tra 0 e 3600 secondi. |
| Valore derivato del raffreddamento | Valore derivato per il raffreddamento. Può assumere valori compresi tra 0.0 e 999.9. |
| Periodo di uscita | L'output è il periodo di controllo. Può assumere valori compresi tra 1 e 150 secondi. |
| Riscaldamento/Raffreddamento Seleziona | Specifica il funzionamento del canale per PID o ON/OFF. 0 = Riscaldamento 1 = Raffrescamento |
| Sintonizzazione automatica | Avvia l'operazione di Auto Tune per PID.
0 = Auto Tune passivo 1 = Auto Tune attivo |
- Nota: Per i valori in notazione puntata, nella comunicazione Modbus vengono utilizzati 10 volte il valore reale di questi parametri.
Indirizzi PID Modbus:
| Parametro | AI1
Indirizzo |
AI2
Indirizzo |
AI3
Indirizzo |
AI4
Indirizzo |
AI5
Indirizzo |
Predefinito |
| PID attivo | 40023 | 40043 | 40063 | 40083 | 40103 | 0 |
| Imposta valore | 40024 | 40044 | 40064 | 40084 | 40104 | 0 |
| Imposta offset | 40025 | 40045 | 40065 | 40085 | 40105 | 0 |
| Offset sensore | 40038 | 40058 | 40078 | 40098 | 40118 | 0 |
| Impostare l'isteresi | 40026 | 40046 | 40066 | 40086 | 40106 | 0 |
| Valore minimo di scala | 40027 | 40047 | 40067 | 40087 | 40107 | 0/-200.0 |
| Valore di scala massimo | 40028 | 40048 | 40068 | 40088 | 40108 | 20000/650.0 |
| Valore proporzionale di riscaldamento | 40029 | 40049 | 40069 | 40089 | 40109 | 10.0 |
| Valore integrale riscaldamento | 40030 | 40050 | 40070 | 40090 | 40110 | 100 |
| Valore della derivata del riscaldamento | 40031 | 40051 | 40071 | 40091 | 40111 | 25.0 |
| Valore proporzionale del raffreddamento | 40032 | 40052 | 40072 | 40092 | 40112 | 10.0 |
| Valore integrale di raffreddamento | 40033 | 40053 | 40073 | 40093 | 40113 | 100 |
| Valore derivato del raffreddamento | 40034 | 40054 | 40074 | 40094 | 40114 | 25.0 |
| Periodo di uscita | 40035 | 40055 | 40075 | 40095 | 40115 | 1 |
| Riscaldamento/Raffreddamento Seleziona | 40036 | 40056 | 40076 | 40096 | 40116 | 0 |
| Sintonizzazione automatica | 40037 | 40057 | 40077 | 40097 | 40117 | 0 |
| Valore di uscita istantanea PID (%) | 30024 | 30032 | 30040 | 30048 | 30056 | – |
| Bit di stato PID | 30025 | 30033 | 30041 | 30049 | 30057 | – |
| Bit di configurazione PID | 40039 | 40059 | 40079 | 40099 | 40119 | 0 |
| Bit di stato di sintonizzazione automatica | 30026 | 30034 | 30042 | 30050 | 30058 | – |
Bit di configurazione PID:
| Indirizzo AI1 | Indirizzo AI2 | Indirizzo AI3 | Indirizzo AI4 | Indirizzo AI5 | Descrizione |
| 40039.0morso | 40059.0morso | 40079.0morso | 40099.0morso | 40119.0morso | Pausa PID:
0 = il funzionamento PID continua. 1 = il PID è fermo e l'uscita è spenta. |
Bit di stato PID:
| Indirizzo AI1 | Indirizzo AI2 | Indirizzo AI3 | Indirizzo AI4 | Indirizzo AI5 | Descrizione |
| 30025.0morso | 30033.0morso | 30041.0morso | 30049.0morso | 30057.0morso | Stato calcolo PID:
0 = Calcolo PID 1 = PID non calcolato. |
|
30025.1morso |
30033.1morso |
30041.1morso |
30049.1morso |
30057.1morso |
Stato calcolo integrale:
0 = Calcolo dell'integrale 1 = L'integrale non viene calcolato |
Bit di stato di sintonizzazione automatica:
| Indirizzo AI1 | Indirizzo AI2 | Indirizzo AI3 | Indirizzo AI4 | Indirizzo AI5 | Descrizione |
| 30026.0morso | 30034.0morso | 30042.0morso | 30050.0morso | 30058.0morso | Stato del primo passaggio di Auto Tune:
1 = Il primo passo è attivo. |
| 30026.1morso | 30034.1morso | 30042.1morso | 30050.1morso | 30058.1morso | Stato del secondo passaggio di Auto Tune:
1 = Il secondo passo è attivo. |
| 30026.2morso | 30034.2morso | 30042.2morso | 30050.2morso | 30058.2morso | Stato del terzo passaggio di Auto Tune:
1 = Il terzo passo è attivo. |
| 30026.3morso | 30034.3morso | 30042.3morso | 30050.3morso | 30058.3morso | Stato del passaggio finale di Auto Tune:
1 = Sintonia automatica completata. |
| 30026.4morso | 30034.4morso | 30042.4morso | 30050.4morso | 30058.4morso | Errore di timeout della sintonizzazione automatica:
1 = C'è un timeout. |
Installazione delle impostazioni di comunicazione per impostazione predefinita
Per schede con versione V01;
- Spegnere il dispositivo del modulo I/O.
- Sollevare il coperchio del dispositivo.
- Cortocircuitare i pin 2 e 4 sulla presa mostrata in figura.
- Attendere almeno 2 secondi energizzando. Dopo 2 secondi, le impostazioni di comunicazione torneranno ai valori predefiniti.
- Rimuovere il cortocircuito.
- Chiudere il coperchio del dispositivo.
Per schede con versione V02;
- Spegnere il dispositivo del modulo I/O.
- Sollevare il coperchio del dispositivo.
- Mettere un ponticello sulla presa mostrata in figura.
- Attendere almeno 2 secondi energizzando. Dopo 2 secondi, le impostazioni di comunicazione torneranno ai valori predefiniti.
- Rimuovere il ponticello.
- Chiudere il coperchio del dispositivo.
Selezione indirizzo slave Modbus
L'indirizzo dello slave può essere impostato da 1 a 255 all'indirizzo 40001 del modbus. Inoltre il Dip Switch presente sulla scheda può essere utilizzato per impostare l'indirizzo slave sulle schede V02.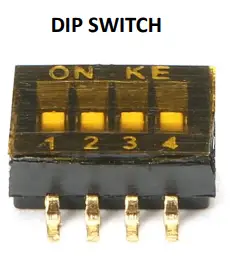
| INTERRUTTORE DIP | ||||
| SCHIAVO ID | 1 | 2 | 3 | 4 |
| Non 1 | ON | ON | ON | ON |
| 1 | SPENTO | ON | ON | ON |
| 2 | ON | SPENTO | ON | ON |
| 3 | SPENTO | SPENTO | ON | ON |
| 4 | ON | ON | SPENTO | ON |
| 5 | SPENTO | ON | SPENTO | ON |
| 6 | ON | SPENTO | SPENTO | ON |
| 7 | SPENTO | SPENTO | SPENTO | ON |
| 8 | ON | ON | ON | SPENTO |
| 9 | SPENTO | ON | ON | SPENTO |
| 10 | ON | SPENTO | ON | SPENTO |
| 11 | SPENTO | SPENTO | ON | SPENTO |
| 12 | ON | ON | SPENTO | SPENTO |
| 13 | SPENTO | ON | SPENTO | SPENTO |
| 14 | ON | SPENTO | SPENTO | SPENTO |
| 15 | SPENTO | SPENTO | SPENTO | SPENTO |
- Nota 1: Quando tutti i Dip Switch sono ON, il valore nel registro Modbus 40001 viene utilizzato come indirizzo slave.
Garanzia
Questo prodotto è garantito contro difetti nei materiali e nella lavorazione per un periodo di due anni dalla data di spedizione all'Acquirente. La Garanzia è limitata alla riparazione o sostituzione dell'unità difettosa a discrezione del produttore. Questa garanzia è nulla se il prodotto è stato alterato, usato in modo improprio, smontato o altrimenti abusato.
Manutenzione
Le riparazioni devono essere eseguite solo da personale addestrato e specializzato. Togliere alimentazione al dispositivo prima di accedere alle parti interne. Non pulire l'involucro con solventi a base di idrocarburi (benzina, tricloroetilene, ecc.). L'uso di questi solventi può ridurre l'affidabilità meccanica del dispositivo.
Altre informazioni
- Informazioni sul produttore:
- Emko Elektronik Sanayi e Ticaret A.Ş.
- Bursa Organizza Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BORSA/TURCHIA
- Telefono : (224) 261 1900
- Numero di fax: (224) 261 1912
- Informazioni sul servizio di riparazione e manutenzione:
- Emko Elektronik Sanayi e Ticaret A.Ş.
- Bursa Organizza Sanayi Bölgesi, (Fethiye OSB Mah.)
- Ali Osman Sönmez Bulvarı, 2. Sokak, No:3 16215
- BORSA/TURCHIA
- Telefono : (224) 261 1900
- Numero di fax: (224) 261 1912
Documenti / Risorse
 |
Modulo di ingresso o uscita EMKO PROOP [pdf] Manuale d'uso PROOP, Modulo di ingresso o uscita, PROOP Modulo di ingresso o uscita, Modulo di ingresso, Modulo di uscita, Modulo |



