![]() Interfaccia codificatore v4.2
Interfaccia codificatore v4.2
Guida per l'utente
Introduzione
(Fai una domanda)
L'encoder incrementale è il sensore più comune utilizzato per il controllo orientato al campo (FOC) di motori CC senza spazzole a magneti permanenti (BLDC) o motori sincroni a magneti permanenti (PMSM). Questo sensore fornisce la posizione angolare relativa come uscita sotto forma di impulsi. Un encoder in quadratura produce tipicamente due uscite, che hanno gli impulsi sfasati di 90°, come mostrato nella Figura 1. Lo sfasamento tra i due segnali A e B rappresenta la direzione di rotazione. La logica dell'interfaccia dell'encoder utilizza il rilevamento del fronte sul fronte di salita e sul fronte di discesa di A e B, come mostrato nella Figura 2. Ciò fornisce una risoluzione quattro volte superiore alla risoluzione dell'encoder e produce una risoluzione molto elevata da un encoder a basso costo.
La figura seguente mostra i segnali dell'encoder in senso orario e antiorario.
Figura 1. Segnali dell'encoder nelle direzioni in senso orario e antiorario La figura seguente mostra il rilevamento dei fronti degli impulsi dell'encoder per una risoluzione più elevata.
La figura seguente mostra il rilevamento dei fronti degli impulsi dell'encoder per una risoluzione più elevata.
Figura 2. Rilevamento dei fronti degli impulsi dell'encoder per una risoluzione più elevata Dopo il rilevamento del bordo, i contatori vengono utilizzati per ottenere una posizione angolare del rotore in termini di angolo elettrico in modo che possa essere utilizzata direttamente per il FOC. Il valore Angle_count_max rappresenta il numero totale di bordi che verranno rilevati in una rotazione meccanica del rotore. L'output dell'angolo varia da 0 a 262143, dove 262143 rappresenta 360°. La variazione dell'angolo di uscita rispetto ai bordi è mostrata in Figura 3 per velocità positiva e Figura 4 per velocità negativa. La velocità in uscita viene calcolata in base alla velocità di variazione della posizione angolare.
Dopo il rilevamento del bordo, i contatori vengono utilizzati per ottenere una posizione angolare del rotore in termini di angolo elettrico in modo che possa essere utilizzata direttamente per il FOC. Il valore Angle_count_max rappresenta il numero totale di bordi che verranno rilevati in una rotazione meccanica del rotore. L'output dell'angolo varia da 0 a 262143, dove 262143 rappresenta 360°. La variazione dell'angolo di uscita rispetto ai bordi è mostrata in Figura 3 per velocità positiva e Figura 4 per velocità negativa. La velocità in uscita viene calcolata in base alla velocità di variazione della posizione angolare.
Per configurare l'interfaccia dell'encoder vengono utilizzati tre parametri:
La figura seguente mostra l'uscita Theta per la direzione positiva.
Figura 3. Uscita theta per direzione positiva La figura seguente mostra l'uscita Theta per la direzione negativa.
La figura seguente mostra l'uscita Theta per la direzione negativa.
Figura 4. Uscita theta per la direzione negativa
Riepilogo (Fai una domanda)
La tabella seguente fornisce un riepilogo delle caratteristiche IP dell'interfaccia dell'encoder.
| Versione principale | Questo documento si applica all'interfaccia Encoder v4.2. |
| Famiglie di dispositivi supportate | • SoC PolarFire® • PolarFire •RTG4™ •IGLOO®2 • SmartFusion®2 |
| Flusso di strumenti supportato | Richiede Libero® SoC v11.8 o versioni successive. |
| Licenza | Per il core viene fornito il codice RTL crittografato completo, consentendo di istanziare il core con SmartDesign. Simulazione, sintesi e layout possono essere eseguiti con il software Libero. Encoder Interface viene concesso in licenza con RTL crittografato che deve essere acquistato separatamente. Per ulteriori informazioni, vedere Interfaccia codificatore. |
Caratteristiche (Fai una domanda)
L'interfaccia dell'encoder presenta le seguenti caratteristiche principali:
- Calcola la posizione angolare relativa
- Calcola l'uscita di velocità filtrata
Implementazione di IP Core in Libero Design Suite (Fai una domanda)
L'IP core deve essere installato nel catalogo IP del software Libero® SoC. Ciò avviene automaticamente tramite la funzione di aggiornamento del catalogo IP nel software Libero SoC, oppure il core IP può essere scaricato manualmente dal catalogo.
Una volta installato il core IP nel catalogo IP del software Libero SoC, il core può essere configurato, generato e istanziato all'interno dello strumento SmartDesign per l'inclusione nell'elenco dei progetti Libero.
Utilizzo e prestazioni del dispositivo (Fai una domanda)
La tabella seguente elenca l'utilizzo del dispositivo utilizzato per l'interfaccia encoder.
Tabella 1. Utilizzo dell'interfaccia dell'encoder
| Dettagli del dispositivo | Risorse | Prestazioni (MHz) | RAM | Blocchi matematici | Chip Globali | |||
| Famiglia | Dispositivo | LUT | DFF | LSRAM | µSRAM | |||
| SoC PolarFire® | MPFS250T | 398 | 285 | 200 | 0 | 0 | 2 | 0 |
| Fuoco Polare | MPF300T | 387 | 285 | 200 | 0 | 0 | 2 | 0 |
| Smart Fusion® 2 | M2S150 | 400 | 285 | 140 | 0 | 0 | 2 | 0 |
![]() Importante:
Importante:
- I dati in questa tabella vengono acquisiti utilizzando le tipiche impostazioni di sintesi e layout. La sorgente del clock di riferimento CDR è stata impostata su Dedicato con gli altri valori del configuratore invariati.
- Il clock è vincolato a 200 MHz durante l'esecuzione dell'analisi dei tempi per ottenere i numeri delle prestazioni.
Descrizione funzionale
(Fai una domanda)
La figura seguente mostra lo schema a blocchi dell'interfaccia dell'encoder.
Figura 1-1. Diagramma a blocchi a livello di sistema dell'interfaccia dell'encoder
Il blocco di interfaccia dell'encoder converte i segnali ricevuti da QA, QB nell'angolo e nella velocità corrispondenti. Il blocco conta i fronti dell'encoder fino al raggiungimento del valore corner_count_max_i e poi ricomincia a contare da zero. L'angolo generato viene scalato a 262144 moltiplicandolo per Angle_factor_i. La velocità viene misurata contando il numero di eventi dell'encoder in un periodo di tempo costante definito dall'ingresso speed_window_i. Un filtro viene utilizzato per filtrare il rumore di quantizzazione dalla misurazione della velocità. La costante di tempo del filtro può essere configurata utilizzando il valore filter_factor_i utilizzando la seguente equazione:
Costante di tempo del filtro = periodo di tempo tra impulsi successivi di pwm midmatch _ i × 2 filter_factor_i
L'ingresso sensor_reset_i viene utilizzato per trovare l'angolo elettrico del motore iniettando corrente costante per una breve durata.
Quando il motore si è allineato all'angolo iniettato, l'uscita dell'encoder viene inizializzata con 90° o 270° in base alla direzione di rotazione iniziale. Si prevede che il conteggio dei fronti dell'encoder inizi dopo il rilevamento del fronte di discesa dell'ingresso sensor_reset_i.
L'ingresso clear_buffer_i può essere utilizzato per ripristinare il buffer del filtro, poiché è previsto che il buffer del filtro venga ripristinato quando il motore si ferma.
L'ingresso Direction_config_i viene utilizzato per rilevare inizialmente la direzione del motore. Una volta che il motore inizia a funzionare, la direzione del motore viene rilevata dai segnali dell'encoder e utilizzata per generare l'angolo.
Parametri di interfaccia dell'encoder e segnali di interfaccia
(Fai una domanda)
Questa sezione descrive i parametri nel configuratore della GUI dell'interfaccia encoder e i segnali I/O.
2.1 Segnali di ingressi e uscite (Fai una domanda)
La tabella seguente elenca le porte di ingresso e uscita dell'interfaccia encoder.
| Nome del segnale | Direzione | Descrizione |
| reimposta_i | Ingresso | Segnale di reset asincrono basso attivo |
| sys_clk_i | Ingresso | Orologio di sistema |
| fil_trig_i | Ingresso | Ingresso trigger filtro. A questo ingresso deve essere fornito un impulso di temporizzazione della durata di un ciclo di clock. La periodicità dell'impulso determina la sampling tempo. |
| direzione_config_i | Ingresso | Bit di configurazione della direzione: utilizzato al momento della calibrazione per allineare il rotore. Quando 1, allinea il rotore per l'avvio in senso antiorario o quando 0, allinea il rotore per l'avvio in senso orario. |
| clear_buffer_i | Ingresso | Cancella generalmente il buffer del filtro quando il motore è fermo. È necessario immettere un impulso della durata di un ciclo di clock ogni volta che il motore si arresta. |
| sensore_reset_i | Ingresso | Segnale di ripristino del sensore: Quando impostato su 1, l'angolo del rotore viene reimpostato sull'equivalente di 90° o 270° come determinato dall'input Direction_config_i. Quando impostato su 0 (zero), funzionamento normale. |
| qa_io | Ingresso | Ingresso encoder A |
| qb_io | Ingresso | Ingresso encoder B |
| fattore_velocità_i | Ingresso | Moltiplicatore di scala dell'uscita della velocità |
| fattore_angolo_i | Ingresso | Moltiplicatore di scala dell'uscita angolare |
| angolo_count_max_i | Ingresso | Valore massimo del conteggio dell'angolo in termini di eventi di impulso dell'encoder. |
| velocità_finestra_i | Ingresso | La finestra temporale per il calcolo della velocità, specificata in multipli di 10 µs. Una finestra temporale più ampia offre una migliore risoluzione della velocità ma ha una latenza più elevata. Per una risposta ad alta velocità dinamica è necessario utilizzare una finestra temporale più piccola. |
| fattore_filtro_i | Ingresso | Valore del fattore di filtro per il filtro: se il valore è n, la costante di tempo del filtro è 2^n volte samptempo di utilizzo del filtro definito da filt_trig_i. |
| dir_o | Produzione | Segnale di direzione generato in base ai segnali di ingresso dell'encoder. |
| velocità_fatta_o | Produzione | Indica che il calcolo della velocità è pronto per il filtraggio (alla fine della finestra di velocità). Viene generato un impulso della durata di un ciclo sys_clk_i. |
| filtro_velocità_fatto_o | Produzione | Indica che l'uscita della velocità dopo che il filtraggio è valido (sulla porta di uscita omega_out_o). Viene generato un impulso della durata di un ciclo sys_clk_i. |
| omega_fuori_o | Produzione | Uscita velocità rotore dopo il filtraggio – adatta per l'uso come feedback di velocità nel funzionamento con controllo della velocità. |
| angolo_esterno_o | Produzione | Uscita angolare elettrica adatta per FOC. |
| conteggio_linee | Produzione | Specifica la posizione del rotore in termini di numero di linee dell'encoder (incrementi) dall'ultimo reset del sensore. Adatto per l'uso con operazioni di controllo della posizione. |
Diagrammi di temporizzazione
(Fai una domanda)
Questa sezione illustra il diagramma temporale dell'interfaccia dell'encoder.
La figura seguente mostra il diagramma temporale dell'interfaccia dell'encoder.
Figura 3-1. Diagramma temporale dell'interfaccia dell'encoder
Banco di prova
(Fai una domanda)
Per verificare e testare l'interfaccia dell'encoder viene utilizzato un testbench unificato chiamato testbench utente. Viene fornito Testbench per verificare la funzionalità dell'IP dell'interfaccia dell'encoder.
4.1 Simulazione (Fai una domanda)
I passaggi seguenti descrivono come simulare il core utilizzando il testbench:
- Aprire Libero SoC, fare clic sulla scheda Catalogo, quindi fare clic su Soluzioni-MotorControl.
- Fare doppio clic su Interfaccia codificatore e quindi fare clic su OK. La documentazione associata all'IP è elencata in Documentazione.
 Importante: Se non vedi la scheda Catalogo, fai clic su View, aprire il menu Windows, quindi fare clic su Catalogo per renderlo visibile.
Importante: Se non vedi la scheda Catalogo, fai clic su View, aprire il menu Windows, quindi fare clic su Catalogo per renderlo visibile.
Figura 4-1. Core IP dell'interfaccia encoder nel catalogo Libero SoC
- Nella scheda Stimulus Hierarchy, fare clic su testbench (encoder_interface_tb.v), puntare su Simulate PreSynth Design, quindi fare clic su Open Interactively.
![]() Importante: Se non vedi la scheda Gerarchia degli stimoli, fai clic su View, aprire il menu Windows, quindi fare clic su Gerarchia degli stimoli per renderlo visibile.
Importante: Se non vedi la scheda Gerarchia degli stimoli, fai clic su View, aprire il menu Windows, quindi fare clic su Gerarchia degli stimoli per renderlo visibile.
Figura 4-2. Simulazione del design di pre-sintesi
ModelSim si apre con il banco di prova file come mostrato nella figura seguente.
Figura 4-3. Finestra di simulazione ModelSim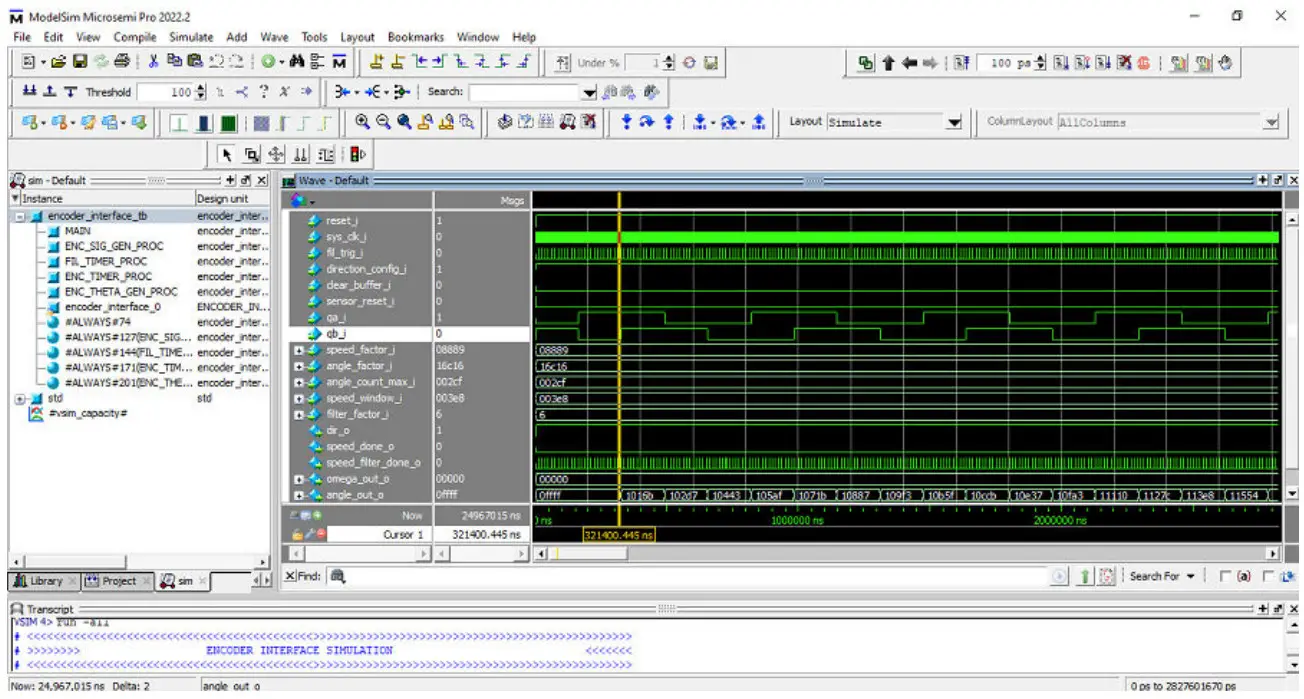
![]() Importante: Se la simulazione viene interrotta a causa del limite di runtime specificato nel file .do file, utilizzare il comando run -all per completare la simulazione.
Importante: Se la simulazione viene interrotta a causa del limite di runtime specificato nel file .do file, utilizzare il comando run -all per completare la simulazione.
Cronologia delle revisioni
(Fai una domanda)
La cronologia delle revisioni descrive le modifiche implementate nel documento. Le modifiche sono elencate per revisione, a partire dalla pubblicazione più recente.
Tabella 5-1. Cronologia delle revisioni
| Revisione | Data | Descrizione |
| A | 03/2023 | Di seguito l'elenco delle modifiche apportate alla revisione A del documento: • Migrato il documento al modello Microchip. • Aggiornato il numero del documento a DS00004913A da 50200659. • Aggiunto 3. Diagrammi temporali. • Aggiunto 4. Banco di prova. |
| 3.0 | — | Di seguito è riportato un riepilogo delle modifiche apportate a questa revisione: • Aggiunta la versione IP al titolo del documento. • Aggiunti i segnali di uscita speed_done_o e speed_filter_done_o. • Rimosso la sezione relativa ai parametri di configurazione dall'implementazione hardware. |
| 2.0 | — | Aggiornato il documento con i nuovi segnali di output. |
| 1.0 | — | La revisione 1.0 è stata la prima pubblicazione di questo documento. |
Supporto FPGA per microchip
(Fai una domanda)
Il gruppo di prodotti Microchip FPGA supporta i propri prodotti con vari servizi di supporto, tra cui Servizio clienti, Centro assistenza tecnica clienti, a websito e uffici vendite in tutto il mondo. Si consiglia ai clienti di visitare le risorse online di Microchip prima di contattare l'assistenza poiché è molto probabile che le loro domande abbiano già ricevuto risposta.
Contattare il Centro di assistenza tecnica tramite il websito a www.microchip.com/support. Menziona il numero di parte del dispositivo FPGA, seleziona la categoria di custodia appropriata e carica il design files durante la creazione di un caso di supporto tecnico.
Contatta il servizio clienti per assistenza non tecnica sui prodotti, ad esempio prezzi dei prodotti, aggiornamenti dei prodotti, informazioni sull'aggiornamento, stato dell'ordine e autorizzazione.
- Dal Nord America, chiamare 800.262.1060
- Dal resto del mondo, chiamare il 650.318.4460
- Fax, da qualsiasi parte del mondo, 650.318.8044
Informazioni sul microchip
Il microchip Websito (Fai una domanda)
Microchip fornisce supporto online tramite il nostro websito a www.microchip.com/. Questo webil sito è utilizzato per fare filee informazioni facilmente accessibili ai clienti. Alcuni dei contenuti disponibili includono:
- Supporto prodotto – Schede tecniche ed errata, note applicative e sampprogrammi, risorse di progettazione, guide per l'utente e documenti di supporto hardware, ultime versioni software e software archiviato
- Supporto tecnico generale – Domande frequenti (FAQ), richieste di supporto tecnico, gruppi di discussione online, elenco dei membri del programma dei partner di progettazione Microchip
- Affari di Microchip – Guide per la selezione e l'ordinazione dei prodotti, ultimi comunicati stampa di Microchip, elenco di seminari ed eventi, elenco di uffici vendita, distributori e rappresentanti di fabbrica di Microchip
Servizio di notifica di modifica del prodotto (Fai una domanda)
Il servizio di notifica delle modifiche ai prodotti di Microchip aiuta a mantenere i clienti aggiornati sui prodotti Microchip. Gli abbonati riceveranno una notifica via e-mail ogni volta che ci sono modifiche, aggiornamenti, revisioni o errata relativi a una specifica famiglia di prodotti o strumento di sviluppo di interesse.
Per registrarsi, andare su www.microchip.com/pcn e segui le istruzioni per la registrazione.
Assistenza clienti (Fai una domanda)
Gli utenti dei prodotti Microchip possono ricevere assistenza attraverso diversi canali:
- Distributore o rappresentante
- Ufficio Commerciale Locale
- Ingegnere di soluzioni integrate (ESE)
- Supporto tecnico
I clienti devono contattare il loro distributore, rappresentante o ESE per ricevere supporto. Sono disponibili anche uffici vendite locali per aiutare i clienti. Un elenco di uffici vendite e sedi è incluso in questo documento.
Il supporto tecnico è disponibile tramite websito a: www.microchip.com/support
Funzionalità di protezione del codice dei dispositivi a microchip (Fai una domanda)
Si noti quanto segue in merito alla funzionalità di protezione del codice sui prodotti Microchip:
- I prodotti Microchip soddisfano le specifiche contenute nella rispettiva scheda tecnica Microchip.
- Microchip ritiene che la sua famiglia di prodotti sia sicura se utilizzata nel modo previsto, nel rispetto delle specifiche operative e in condizioni normali.
- Microchip apprezza e protegge in modo aggressivo i suoi diritti di proprietà intellettuale. I tentativi di violare le funzionalità di protezione del codice del prodotto Microchip sono severamente vietati e possono violare il Digital Millennium Copyright Act.
- Né Microchip né alcun altro produttore di semiconduttori può garantire la sicurezza del suo codice. La protezione del codice non significa che stiamo garantendo che il prodotto sia "indistruttibile". La protezione del codice è in continua evoluzione. Microchip si impegna a migliorare costantemente le funzionalità di protezione del codice dei nostri prodotti.
Note legali (Fai una domanda)
Questa pubblicazione e le informazioni ivi contenute possono essere utilizzate solo con i prodotti Microchip, anche per progettare, testare e integrare i prodotti Microchip con l'applicazione. L'uso di queste informazioni in qualsiasi altro modo viola questi termini. Le informazioni relative alle applicazioni del dispositivo sono fornite solo per comodità dell'utente e possono essere sostituite da aggiornamenti. È tua responsabilità assicurarti che la tua applicazione soddisfi le tue specifiche. Contattare l'ufficio vendite Microchip locale per ulteriore supporto o ottenere ulteriore supporto all'indirizzo www.microchip.com/en-us/support/design-help/client-support-services.
QUESTE INFORMAZIONI SONO FORNITE DA MICROCHIP "COSÌ COME SONO". MICROCHIP NON RILASCIA ALCUNA DICHIARAZIONE O GARANZIA DI ALCUN TIPO, SIA ESSE ESPRESSE O IMPLICITE, SCRITTE O ORALI, STATUTARIE O ALTRO, RELATIVE ALLE INFORMAZIONI, INCLUSE, SENZA LIMITAZIONE, QUALSIASI GARANZIA IMPLICITA DI NON VIOLAZIONE, COMMERCIABILITÀ E IDONEITÀ PER UNO SCOPO PARTICOLARE, O GARANZIE RELATIVE ALLA SUA CONDIZIONE, QUALITÀ O PRESTAZIONI.
IN NESSUN CASO MICROCHIP SARÀ RITENUTA RESPONSABILE PER QUALSIASI PERDITA, DANNO, COSTO O SPESA INDIRETTA, SPECIALE, PUNITIVA, ACCIDENTALE O CONSEGUENTE DI QUALSIASI TIPO CORRELATA ALLE INFORMAZIONI O AL SUO UTILIZZO, COMUNQUE CAUSATA, ANCHE SE MICROCHIP È STATA INFORMATA DELLA POSSIBILITÀ O SE I DANNI SONO PREVEDIBILI. NELLA MISURA MASSIMA CONSENTITA DALLA LEGGE, LA RESPONSABILITÀ TOTALE DI MICROCHIP PER TUTTI I RECLAMI IN QUALSIASI MODO CORRELATI ALLE INFORMAZIONI O AL SUO UTILIZZO NON SUPERERÀ L'IMPORTO DELLE COMMISSIONI, SE PRESENTI, CHE AVETE PAGATO DIRETTAMENTE A MICROCHIP PER LE INFORMAZIONI.
L'uso dei dispositivi Microchip in applicazioni di supporto vitale e/o di sicurezza è interamente a rischio dell'acquirente, il quale accetta di difendere, indennizzare e tenere indenne Microchip da qualsiasi danno, reclamo, causa o spesa risultante da tale uso. Nessuna licenza viene trasferita, implicitamente o in altro modo, in base ai diritti di proprietà intellettuale di Microchip, salvo diversamente specificato.
Marchi (Fai una domanda)
Il nome e il logo Microchip, il logo Microchip, Adaptec, AVR, logo AVR, AVR Freaks, BesTime, BitCloud, CryptoMemory, CryptoRF, dsPIC, flexPWR, HELDO, IGLOO, JukeBlox, KeeLoq, Kleer, LANCheck, LinkMD, maXStylus, maXTouch, MediaLB, megaAVR, Microsemi, logo Microsemi, MOST, logo MOST, MPLAB, OptoLyzer, PIC, picoPower, PICSTART, logo PIC32, PolarFire, Prochip Designer, QTouch, SAM-BA, SenGenuity, SpyNIC, SST, logo SST, SuperFlash, Symmetricom , SyncServer, Tachyon, TimeSource, tinyAVR, UNI/O, Vectron e XMEGA sono marchi registrati di Microchip Technology Incorporated negli Stati Uniti e in altri paesi.
AgileSwitch, APT, ClockWorks, The Embedded Control Solutions Company, EtherSynch, Flashtec, Hyper Speed Control, HyperLight Load, Libero, motorBench, mTouch, Powermite 3, Precision Edge, ProASIC, ProASIC Plus, logo ProASIC Plus, QuietWire, SmartFusion, SyncWorld, Temux, TimeCesium, TimeHub, TimePictra, TimeProvider, TrueTime e ZL sono marchi registrati di Microchip Technology Incorporated negli Stati Uniti
Soppressione della chiave adiacente, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, Augmented Switching, BlueSky, BodyCom, Clockstudio, CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM, dsPICDEM.net, Dynamic Average Matching , DAM, ECAN, Espresso T1S, EtherGREEN, GridTime, IdealBridge, In-Circuit Serial Programming, ICSP, INICnet, Paralleling intelligente, IntelliMOS, Connettività tra chip, JitterBlocker, Knob-on-Display, KoD, maxCrypto, maxView, memBrain, Mindi, MiWi, MPASM, MPF, logo certificato MPLAB, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient Code Generation, PICDEM, PICDEM.net, PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple Blocker, RTAX , RTG4, SAM-ICE, Serial Quad I/O, simpleMAP, SimpliPHY, SmartBuffer, SmartHLS, SMART-IS, storClad, SQI, SuperSwitcher, SuperSwitcher II, Switchtec, SynchroPHY, Total Endurance, Trusted Time, TSHARC, USBCheck, VariSense, VectorBlox, VeriPHY, ViewSpan, WiperLock, XpressConnect e ZENA sono marchi registrati di Microchip Technology Incorporated negli Stati Uniti e in altri paesi.
SQTP è un marchio di servizio di Microchip Technology Incorporated negli USA
Il logo Adaptec, Frequency on Demand, Silicon Storage Technology e Symmcom sono marchi registrati di Microchip Technology Inc. in altri paesi.
GestIC è un marchio registrato di Microchip Technology Germany II GmbH & Co. KG, una sussidiaria di Microchip Technology Inc., in altri paesi.
Tutti gli altri marchi qui menzionati sono di proprietà delle rispettive aziende.
©2023, Microchip Technology Incorporated e le sue sussidiarie. Tutti i diritti riservati.
ISBN: 978-1-6683-2164-5
Sistema di gestione della qualità (Fai una domanda)
Per informazioni sui sistemi di gestione della qualità di Microchip, visitare www.microchip.com/qualità.
Vendite e assistenza in tutto il mondo
| AMERICHE | ASIA/PACIFICO | ASIA/PACIFICO | EUROPA |
| Sede aziendale 2355 West Chandler Boulevard. Chandler, AZ 85224-6199 Tel: Numero di telefono: 480-792-7200 Fax: Numero di telefono: 480-792-7277 Supporto tecnico: www.microchip.com/support Web Indirizzo: www.microchip.com Atlanta Duluth, Georgia Tel: Numero di telefono: 678-957-9614 Fax: Numero di telefono: 678-957-1455 Austin, Texas Tel: Numero di telefono: 512-257-3370 Boston Westborough, MA Tel: Numero di telefono: 774-760-0087 Fax: Numero di telefono: 774-760-0088 Chicago Itasca, IL Tel: Numero di telefono: 630-285-0071 Fax: Numero di telefono: 630-285-0075 Dallas Addison, TX Tel: Numero di telefono: 972-818-7423 Fax: Numero di telefono: 972-818-2924 Detroit Novi, MI Tel: Numero di telefono: 248-848-4000 Houston, Texas Tel: Numero di telefono: 281-894-5983 Indianapolis Noblesville, Indiana Tel: Numero di telefono: 317-773-8323 Fax: Numero di telefono: 317-773-5453 Tel: Numero di telefono: 317-536-2380 Los Angeles Missione Viejo, California Tel: Numero di telefono: 949-462-9523 Fax: Numero di telefono: 949-462-9608 Tel: Numero di telefono: 951-273-7800 Raleigh, Carolina del Nord Tel: Numero di telefono: 919-844-7510 Nuova York, Stati Uniti Tel: Numero di telefono: 631-435-6000 San Jose, California Tel: Numero di telefono: 408-735-9110 Tel: Numero di telefono: 408-436-4270 Canada – Toronto Tel: Numero di telefono: 905-695-1980 Fax: Numero di telefono: 905-695-2078 |
Australia – Sidney Tel: 61-2-9868-6733 Cina – Pechino Tel: 86-10-8569-7000 Cina – Chengdu Tel: 86-28-8665-5511 Cina – Chongqing Tel: 86-23-8980-9588 Cina – Dongguan Tel: 86-769-8702-9880 Cina – Canton Tel: 86-20-8755-8029 Cina – Hangzhou Tel: 86-571-8792-8115 Cina – RAS di Hong Kong Tel: 852-2943-5100 Cina – Nanchino Tel: 86-25-8473-2460 Cina – Qingdao Tel: 86-532-8502-7355 Cina – Shanghai Tel: 86-21-3326-8000 Cina – Shenyang Tel: 86-24-2334-2829 Cina – Shenzhen Tel: 86-755-8864-2200 Cina – Suzhou Tel: 86-186-6233-1526 Cina – Wuhan Tel: 86-27-5980-5300 Cina – Xian Tel: 86-29-8833-7252 Cina – Xiamen Tel: 86-592-2388138 Cina – Zhuhai Tel: 86-756-3210040 |
India – Bangalore Tel: 91-80-3090-4444 India – Nuova Delhi Tel: 91-11-4160-8631 India – Puna Tel: 91-20-4121-0141 Giappone – Osaka Tel: 81-6-6152-7160 Giappone – Tokyo Telefono: 81-3-6880-3770 Corea – Daegu Tel: 82-53-744-4301 Corea – Seul Tel: 82-2-554-7200 Malesia – Kuala Lumpur Tel: 60-3-7651-7906 Malesia – Penang Tel: 60-4-227-8870 Filippine – Manila Tel: 63-2-634-9065 Singapore Tel: 65-6334-8870 Taiwan – Hsin Chu Tel: 886-3-577-8366 Taiwan-Kaohsiung Tel: 886-7-213-7830 Taiwan-Taipei Tel: 886-2-2508-8600 Thailandia – Bangkok Tel: 66-2-694-1351 Vietnam-Ho Chi Minh Tel: 84-28-5448-2100 |
Austria – Wels Tel: 43-7242-2244-39 Fax: 43-7242-2244-393 Danimarca – Copenaghen Tel: 45-4485-5910 Fax: 45-4485-2829 Finlandia – Espoo Tel: 358-9-4520-820 Francia – Parigi Tel: 33-1-69-53-63-20 Fax: 33-1-69-30-90-79 Germania – Garching Tel: 49-8931-9700 Germania – Haan Tel: 49-2129-3766400 Germania – Heilbronn Tel: 49-7131-72400 Germania – Karlsruhe Tel: 49-721-625370 Germania – Monaco di Baviera Tel: 49-89-627-144-0 Fax: 49-89-627-144-44 Germania – Rosenheim Tel: 49-8031-354-560 Israele – Ra'anana Tel: 972-9-744-7705 Italia – Milano Tel: 39-0331-742611 Fax: 39-0331-466781 Italia – Padova Tel: 39-049-7625286 Paesi Bassi – Drunen Tel: 31-416-690399 Fax: 31-416-690340 Norvegia – Trondheim Tel: 47-72884388 Polonia – Varsavia Tel: 48-22-3325737 Romania – Bucarest Tel: 40-21-407-87-50 Spagna – Madrid Tel: 34-91-708-08-90 Fax: 34-91-708-08-91 Svezia – Göteborg Tel: 46-31-704-60-40 Svezia – Stoccolma Tel: 46-8-5090-4654 Regno Unito – Wokingham Tel: 44-118-921-5800 Fax: 44-118-921-5820 |
© 2023Microchip Technology Inc.
e le sue controllate
Modello DS00004913A
Documenti / Risorse
 |
Interfaccia codificatore MICROCHIP v4.2 [pdf] Guida utente v4.2 Interfaccia codificatore, v4.2, Interfaccia codificatore, Interfaccia |