Encoder assoluto con risoluzione a 25 bit Netzer DS-17

Prefazione
- Versione 2.0: novembre 2021
Documenti applicabili
- Scheda tecnica dell'encoder elettrico DS-25
Protezione ESD
Come di consueto per i circuiti elettronici, durante la manipolazione del prodotto non toccare circuiti elettronici, cavi, connettori o sensori senza un'adeguata protezione ESD. L'integratore/operatore dovrà utilizzare apparecchiature ESD per evitare il rischio di danni al circuito.
ATTENZIONE
OSSERVARE LE PRECAUZIONI PER LA MANIPOLAZIONE DI DISPOSITIVI SENSIBILI ALLE ELETTROSTATICHE
Prodotto finitoview
Sopraview
L'encoder elettrico di posizione assoluta DS-25 è un sensore di posizione rivoluzionario originariamente sviluppato per applicazioni critiche in ambienti difficili. Attualmente, opera in un'ampia gamma di applicazioni, tra cui la difesa, la sicurezza nazionale, l'aerospaziale e l'automazione medica e industriale. La tecnologia senza contatto Electric Encoder™ si basa sull'interazione tra lo spostamento misurato e un campo elettrico modulato nello spazio/tempo. Il DS-25 Electric Encoder™ è semi-modulare, ovvero il rotore e lo statore sono separati, con lo statore che alloggia saldamente il rotore.
- Statore encoder
- Rotore dell'encoder
- Montaggio encoder clamps
- Dispositivo di fissaggio del rotore
- Interfaccia via cavo

Diagramma di flusso dell'installazione
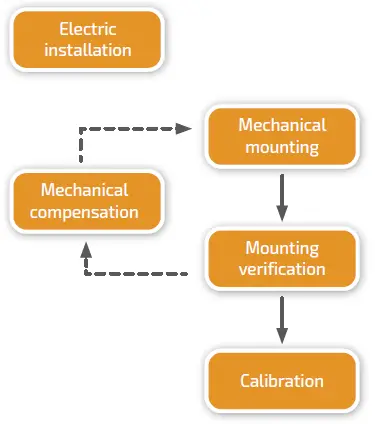
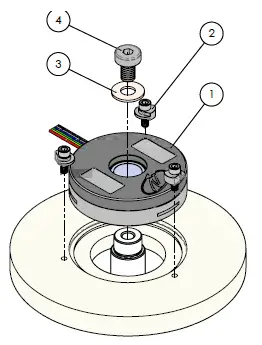
Montaggio dell'encoder
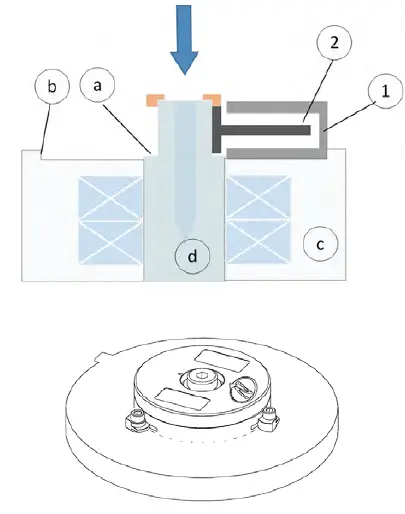
Il rotore dell'encoder (2) si collega all'albero host (d) premendolo contro una spalla dedicata (a), una vite e una rondella o una molla circolare e una rondella all'estremità della spalla per mantenere la pressione, forza consigliata di 0.3 Nm con vite M3.
Lo statore dell'encoder (1) è centrato dal gradino circonferenziale (b) e collegato allo statore host (c) utilizzando tre encoder clamps, forza consigliata 0.3 Nm con l'encoder in dotazione clamps.
Nota:
NON utilizzare materiali di bloccaggio delle viti contenenti cianoacrilato che interagiscono in modo aggressivo con il corpo del sensore in Ultem.
Posizione relativa statore/rotore dell'encoder
Il rotore è flottante, pertanto, per un corretto montaggio assiale, la distanza relativa “H” tra la spalla dell'albero (b) e la cavità di montaggio dello statore (a) deve essere nominale di 1.4 mm.
Per facilitare la compensazione del montaggio meccanico tramite gli spessori del rotore, la distanza consigliata è 1.4 – 0.05 mm, ottenendo un'uscita analogica. L'ottimale consigliato ampi valori di altitudine sono medi rispetto a quelli mostrati nel software Encoder Explorer e variano a seconda del tipo di encoder.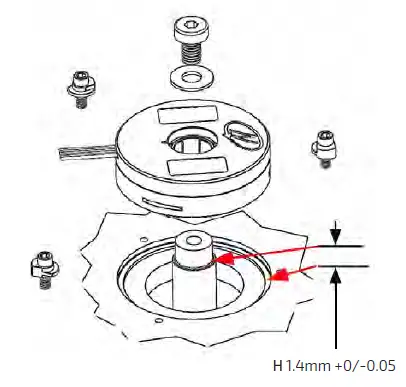
Il DS-25 ampCompensazione delle lititudini
La compensazione meccanica utilizzando spessori da 50 um sotto il rotore (disponibile come kit DS-25-R-00), aumenterà la amplivello di litudine di ~ 50mV. Verificare il corretto montaggio del rotore con gli strumenti Encoder Explorer "Analizzatore di segnale" o "Verifica dell'installazione meccanica".
Nota: per maggiori informazioni si prega di leggere il paragrafo 6
Disimballaggio
Ordine standard
La confezione dello standard DS-25 contiene l'encoder con cavo schermato AWG250 da 30mm e kit montaggio encoder EAPK004 clamps, (3 clamps, 0-80 UNF HEX Vite a esagono incassato L 3/16”, SS )
Accessori opzionali:
- DS-25-R-00, kit spessori rotore (x10 spessori in acciaio inossidabile, 50um ciascuno)
- MA-DS25-004, Kit di installazione estremità albero (vite M3x5 + rondella)
- CNV-00003, convertitore da RS-422 a USB (modalità di configurazione)
- NanoMIC-KIT-01, convertitore da RS-422 a USB. Configurazione e modalità operative tramite interfaccia SSi/BiSS.
- DKIT-DS-25-SF-S0, encoder SSi montato su maschera rotante, convertitore da RS-422 a USB e cavi.
- DKIT-DS-25-IF-S0, encoder BiSS montato su maschera rotante, convertitore da RS-422 a USB e cavi.
Interconnessione elettrica
Questo capitolo rifviews i passaggi necessari per collegare elettricamente l'encoder con interfaccia digitale (SSi o BiSS-C).
Collegamento dell'encoder
L'encoder ha due modalità operative:
Posizione assoluta su SSi o BiSS-C:
Questa è la modalità predefinita di accensione
Codice colore fili interfaccia SSi / BiSS
| Orologio + | Grigio |
Orologio |
| Orologio - | Blu | |
| Dati - | Giallo |
Dati |
| Dati + | Verde | |
| Terra | Nero | Terra |
| +5V | Rosso | Alimentazione elettrica |
Modalità di configurazione su NCP (Netzer Communication Protocol)
Questa modalità di servizio fornisce l'accesso tramite USB a un PC che esegue l'applicazione Netzer Encoder Explorer (su MS Windows 7/10). La comunicazione avviene tramite Netzer Communication Protocol (NCP) su RS-422 utilizzando lo stesso set di cavi. Utilizzare la seguente assegnazione dei pin per collegare l'encoder a un connettore di tipo D a 9 pin al convertitore RS-422/USB CNV-0003 o al NanoMIC.
Interfaccia encoder elettrico, tipo D 9 pin femmina
| Descrizione | Colore | Funzione | Pin n |
|
Orologio SSi / RX NCP |
Grigio | Orologio / RX + | 2 |
| Blu | Orologio / RX – | 1 | |
|
Dati SSi / TX NCP |
Giallo | Dati / TX – | 4 |
| Verde | Dati / TX + | 3 | |
| Terra | Nero | Terra | 5 |
| Alimentazione elettrica | Rosso | +5V | 8 |
Collegamento elettrico e messa a terra
L'encoder NON viene fornito con un cavo e un connettore specifici, tuttavia, osservare le considerazioni sulla messa a terra:
- Lo schermo del cavo non si collega alla linea di ritorno dell'alimentazione.
- Mettere a terra l'albero host per evitare interferenze dal sistema host, che potrebbero causare rumore interno dell'encoder.
Nota: È necessaria un'alimentazione da 4.75 a 5.25 V CC
Installazione del software
Il software Electric Encoder Explorer (EEE):
- Verifica la correttezza del montaggio meccanico
- Calibrazione offset
- Imposta l'analisi generale e del segnale
Questo capitolo rifviews i passaggi associati all'installazione dell'applicazione software EEE.
Requisiti minimi
- Sistema operativo: Windows MS 7/10, (32/64 bit)
- Memoria: Minimo 4 MB
- Porte di comunicazione: USB 2
- Windows .NET Framework, V4 minimo
Installazione del software
- Eseguire Electric Encoder™ Explorer file trovato sul Netzer websito: Encoder Explorer Software Tools
- Dopo l'installazione, vedrai l'icona del software Electric Encoder Explorer sul desktop del computer.
- Fare clic sull'icona del software Electric Encoder Explorer per iniziare.
Verifica del montaggio
Avvio di Encoder Explorer
Assicurati di completare correttamente le seguenti attività:
- Montaggio meccanico
- Connessione elettrica
- Collegamento dell'encoder per la calibrazione
- Encoder Esplora l'installazione del software
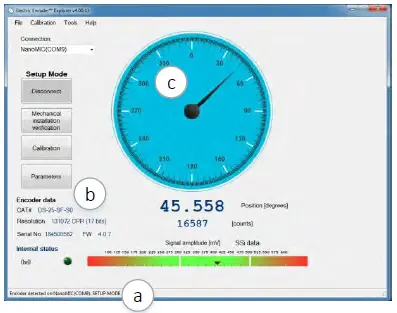
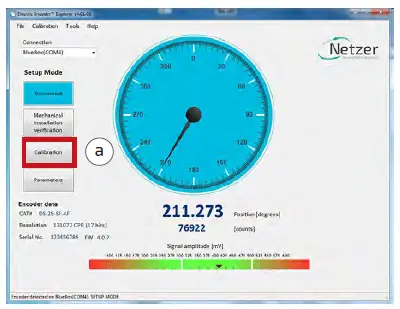
Eseguire lo strumento Electric Encoder Explorer (EEE)
Garantire una corretta comunicazione con l'encoder: (modalità di configurazione per impostazione predefinita).
- La barra di stato indica che la comunicazione è andata a buon fine.
- I dati dell'encoder vengono visualizzati nell'area dei dati dell'encoder. (N. CAT, N. di serie)
- Il display del quadrante di posizione risponde alla rotazione dell'albero.
Eseguire la verifica del montaggio e la selezione della direzione di rotazione prima della calibrazione per garantire prestazioni ottimali. Si consiglia inoltre di osservare l'installazione nella finestra [Strumenti – Analizzatore di segnale].Verifica dell'installazione meccanica
La verifica dell'installazione meccanica fornisce una procedura che assicurerà il corretto montaggio meccanico raccogliendo i dati grezzi dei canali fini e grossolani durante la rotazione. - Selezionare [Verifica montaggio meccanico] nella schermata principale.

- Selezionare [Avvia] per avviare la raccolta dei dati.
- Ruotare l'albero per raccogliere i dati dei canali fini e grossolani.
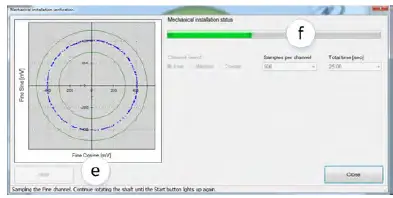
- Al termine di una verifica riuscita, il SW mostrerà "Installazione meccanica corretta".
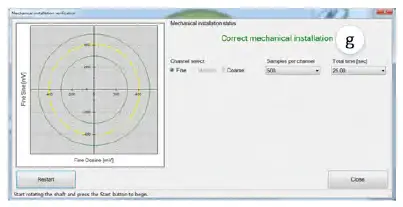
- Se il SW indica “Installazione meccanica errata”, correggere la posizione meccanica del rotore, come presentato nel paragrafo 3.3 – “Posizione relativa del rotore”.

Calibrazione
Nuova caratteristica
Opzione di calibrazione automatica abilitata. Fare riferimento al documento: Auto-calibration-feature-user-manual-V01
Calibrazione offset
Per prestazioni ottimali degli encoder elettrici, l'inevitabile offset CC dei segnali seno e coseno deve essere compensato sul settore operativo.
Dopo aver completato con successo la procedura di verifica del montaggio:
- Selezionare [Calibrazione] nella schermata principale.
- Avviare l'acquisizione dei dati ruotando l'albero. La barra di avanzamento (c) indica l'avanzamento della raccolta. Ruota l'asse in modo coerente durante la raccolta dei dati, coprendo il settore di lavoro dell'applicazione dall'inizio alla fine, per impostazione predefinita la procedura raccoglie 500 punti in 75 secondi. La velocità di rotazione non è un parametro durante la raccolta dei dati. L'indicazione della raccolta dati mostra per i canali fini/grossolani, un chiaro cerchio "sottile" appare al centro (d) (e) con un certo offset.
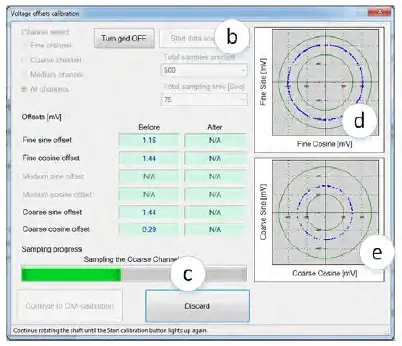
Compensato offset canale fine / Corse 
Calibrazione CAA
La seguente calibrazione allinea il canale grossolano/fine raccogliendo dati da ciascun punto di entrambi i canali. Selezionare [Continua con la calibrazione CAA] Nella finestra di calibrazione dell'angolo CAA, selezionare il pulsante di opzione pertinente dalle opzioni dell'intervallo di misurazione (a):
- Rotazione meccanica completa - il movimento dell'albero è superiore a 10 gradi - consigliato.
- Sezione limitata – definisce il funzionamento dell'albero in un angolo limitato definito da gradi in caso di <10 gradi
- gratisampling modes – definire il numero di punti di calibrazione nel numero totale di punti nella casella di testo. Il sistema visualizza il numero di punti consigliato per impostazione predefinita. Raccogliere un minimo di nove punti sul settore di lavoro.
- Fare clic sul pulsante [Avvia calibrazione] (b)
- Lo stato (c) indica la successiva operazione richiesta; lo stato di movimento dell'albero; la posizione corrente e la successiva posizione di destinazione verso la quale l'encoder deve essere ruotato.
- Ruotare l'albero/l'encoder nella posizione successiva e fare clic sul pulsante [Continua] (c)
- l'albero dovrebbe essere in STAND STILL durante la raccolta dei dati. Seguire le indicazioni/interazioni durante il processo ciclico di posizionamento del vano –> fermo –> calcolo della lettura.
- Ripetere il passaggio precedente per tutti i punti definiti. Fine (d)
- Fare clic sul pulsante [Salva e continua] (e).
L'ultimo passaggio salva i parametri CAA degli offset, completando il processo di calibrazione.
Impostazione del punto zero dell'encoder
La posizione zero può essere definita ovunque nel settore lavorativo. Ruotare l'albero nella posizione meccanica zero desiderata. Andare sul pulsante “Calibrazione” nella barra dei menu in alto e premere “Imposta UZP”. Selezionare "Imposta posizione corrente" su zero utilizzando l'opzione pertinente e fare clic su [Fine].
Prova di jitter
Eseguire un test di jitter per valutare la qualità dell'installazione; il test del jitter presenta le statistiche di lettura delle letture della posizione assoluta (conteggi) nel tempo. Il jitter comune dovrebbe aumentare di +/- 3 conteggi; un jitter più alto può indicare rumore di sistema.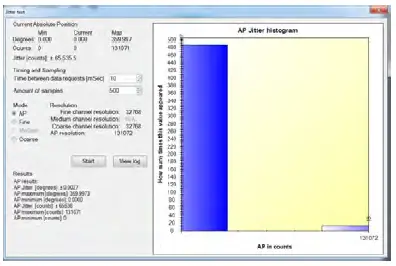
Nel caso in cui i dati di lettura (punti blu) non siano distribuiti uniformemente su un cerchio sottile, è possibile che si verifichino "interferenze" nell'installazione (controllare la messa a terra dell'albero/statore).
Modalità operativa
SSi/BiSS
Indicazione della modalità operativa dell'interfaccia SSi / BiSS Encoder disponibile utilizzando il NanoMIC. Per ulteriori informazioni leggi NanoMIC su Netzer website La modalità operativa presenta l'interfaccia SSi/BiSS “reale” con frequenza di clock di 1MHz.
Protocollo SSi
Protocollo BiSS

Disegni meccanici

Se non diversamente specificato
| Le dimensioni sono in: mm | Finitura superficiale: N6 |
Tolleranze lineari
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
DS-25 con manicotto metallico del rotore


Se non diversamente specificato
| Le dimensioni sono in: mm | Finitura superficiale: N6 |
Tolleranze lineari
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
Vano – Fine installazione (fase)

Se non diversamente specificato
| Le dimensioni sono in: mm | Finitura superficiale: N6 |
Tolleranze lineari
| 0.5-4.9: ±0.05 mm | 5-30: ±0.1 mm |
| 31-120: ±0.15 mm | 121-400: ±0.2 mm |
Nessuna parte/descrizione/quantità
| 1 | DS-25 | Incluso | Encoder DS-25 | 1 | |
| 2 | EAPK004 | Incluso | Kit 0-80” | 3 encoder clampÈ nylon | 1 |
| 3 |
MA-DS25-004 |
Opzionale |
Kit di installazione dell'estremità dell'albero |
Rondella DIN125-A3.2 | 1 |
| 4 | Vite DIN 7984 M3x5 | 1 |
Dimensioni critiche contrassegnate con
AVVERTIMENTO
Non utilizzare Loctite o altre colle contenenti Cianoacrilato. Si consiglia di utilizzare la colla 3M – adesivo epossidico Scotch-WeldTM EC-2216 B/A.
Deep, Shaft – Fine installazione (fase)

Se non diversamente specificato
- Le dimensioni sono in: mm Finitura superficiale: N6
Tolleranze lineari
- 0.5-4.9: ±0.05 mm 5-30: ±0.1 mm
- 31-120: ±0.15 mm 121-400: ±0.2 mm
Nessuna parte/descrizione/quantità
| 1 | DS-25 | Incluso | Encoder DS-25 | 1 | |
| 2 | EAPK005 | Opzionale | Kit | 3 encoder M2 clamps | 1 |
| 3 |
MA-DS25-004 |
Opzionale |
Kit di installazione dell'estremità dell'albero |
Rondella DIN125-A3.2 | 1 |
| 4 | Vite DIN 7984 M3x5 | 1 |
Dimensioni critiche contrassegnate con "*"
AVVERTIMENTO
Non utilizzare Loctite o altre colle contenenti Cianoacrilato. Si consiglia di utilizzare la colla 3M – adesivo epossidico Scotch-WeldTM EC-2216 B/A.
Copyright © 2021 Netzer Precision Position Sensors ACS Ltd. Tutti i diritti riservati.
Documenti / Risorse
 |
Encoder assoluto con risoluzione a 25 bit Netzer DS-17 [pdf] Manuale d'uso DS-25 Encoder assoluto con risoluzione a 17 bit, DS-25, Encoder assoluto con risoluzione a 17 bit, Encoder assoluto con risoluzione, Encoder assoluto, Encoder |



