ROBOWORKS N10 Robot educativo programmabile Robot mobile

Specifiche
| Nome del prodotto | Rapporto di riduzione del motore | Velocità massima | Peso | Carico utile massimo | Misurare | Raggio di sterzata minimo |
|---|---|---|---|---|---|---|
| Robotica 2 | 1:27 | 1.3 m/s | 5.92 kg | 16 kg | 445*360*206mm | 0.77 metri |
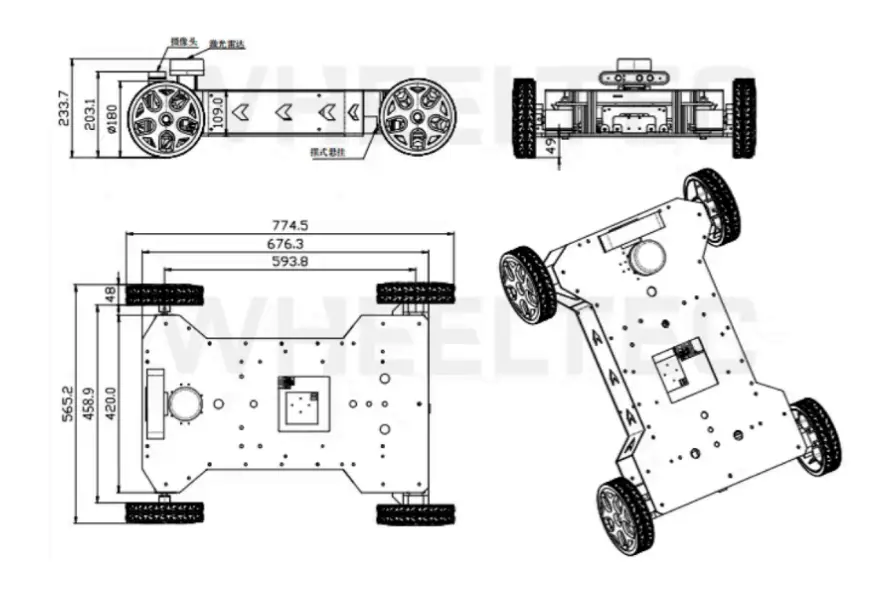
| Rosbot Pro | 1:18 | 1.65 m/s | 19.54 kg | 35 kg | 774*570*227mm | 1.02 metri |
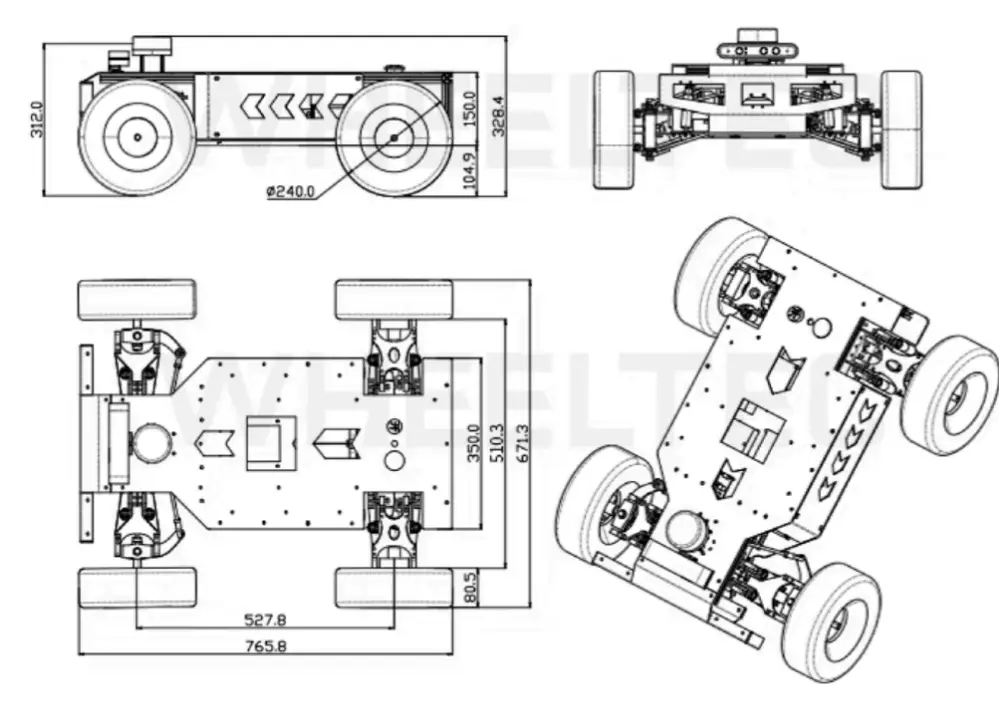
| Rosbot Plus | 1:18 | 2.33 m/s | 35.16 kg | 22 kg | 766*671*319mm | 1.29 metri |
Durata della batteria e alimentazione:
- Robot 2: circa 9.5 ore (senza carico), circa 8.5 ore (a pieno carico)
- Robot Pro: circa 4.5 ore (senza carico), circa 3 ore (a pieno carico)
- Alimentazione: batteria 24v 6000 mAh + caricabatterie intelligente corrente 3A
Sistema di sterzo e guida:
I componenti chiave includono:
- Sterzo: servo digitale S20F 20kg di coppia
- Ruote: WH060 Servo digitale con coppia di 60 kg, ruote in gomma piena da 125 mm di diametro per Rosbot 2, ruote in gomma piena da 150 mm di diametro per Robot Pro e
- Encoder: encoder ad alta precisione AB da 500 linee
- Sistema di sospensione: Sistema di sospensione a pendolo coassiale per Robot 2, Sistema di sospensione indipendente 4W per Robot Pro e
- Interfaccia di controllo: app iOS e Android tramite Bluetooth o Wi-Fi, PS2, CAN, porta seriale, USB
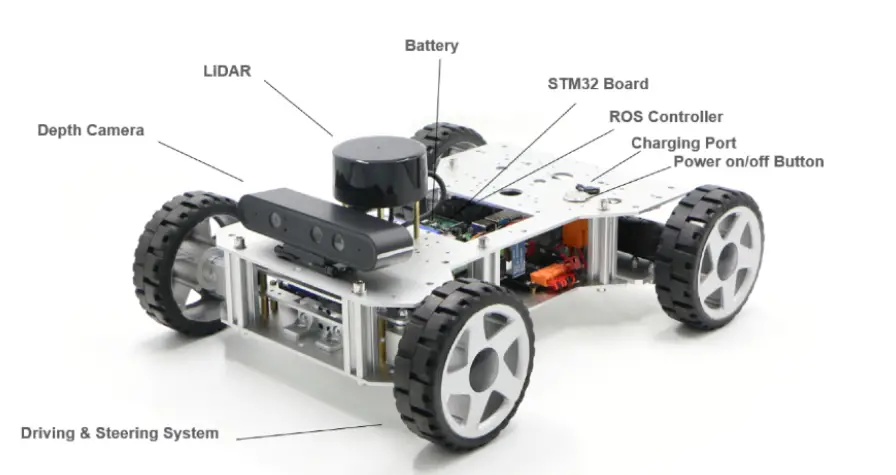
Introduzione ai controller ROS:
Tutti i RRobot sono dotati di una telecamera di profondità Orbbec Astra per vari utilizzi, tra cui il controllo dei gesti, il tracciamento dello scheletro e la scansione 3D.
Scheda STM32:
La scheda è dotata di un core STM32F103RC con varie funzionalità, tra cui memorie, clock, reset e supply management, Power DMA, modalità debug, porte I/O, timer e interfaccia di comunicazione.
Domande frequenti
D: Come si carica la batteria?
A: Utilizzare il caricabatterie intelligente da 3 A in dotazione con la batteria da 24 V 6000 mAh per caricare RRobot
D: Quanto dura la batteria del Rosbot Pro?
R: La batteria del Robot Pro ha una durata di circa 4.5 ore senza carico e di circa 3 ore a pieno carico.
D: Posso controllare il Rosbot tramite smartphone?
R: Sì, puoi controllare Rosbot tramite l'app iOS e Android tramite Bluetooth o Wi-Fi.
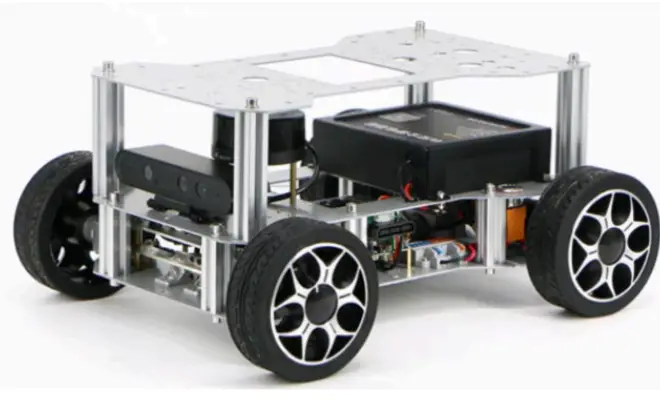
Componente chiave
| Variazione | Immagine |
| Robotica 2 | 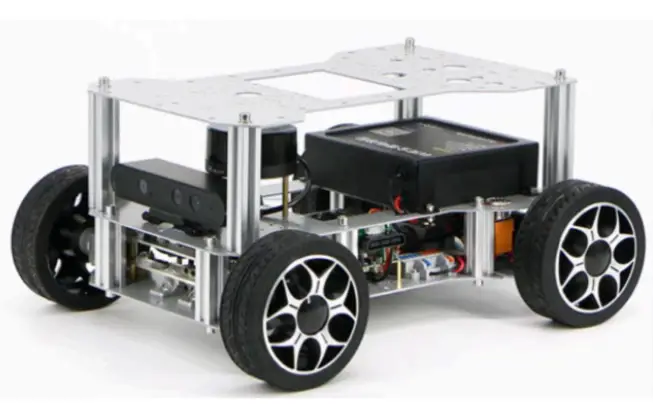 |
| Robot professionista |  |
| Robot più |  |
Specifiche del prodotto
|
Product Matrix |
 |
 |
 |
| Nome del prodotto | Robotica 2 | Robot professionista | Robot più |
| Rapporto di riduzione del motore | 1:27 | 1:18 | 1:18 |
| Velocità massima | 1.3 m/s | 1.65 m/s | 2.33 m/s |
| Peso | 5.92 kg | 19.54 kg | 35.16 kg |
| Carico utile massimo | 16 kg | 35 kg | 22 kg |
| Misurare | 445*360*206mm | 774*570*227mm | 766*671*319mm |
| Raggio di sterzata minimo | 0.77 metri | 1.02 metri | 1.29 metri |
| Durata della batteria | Circa 9.5 ore (senza carico), Circa 8.5 ore (a pieno carico) | Circa 4.5 ore (senza carico), Circa 3 ore (a pieno carico) | |
| Alimentazione elettrica | Batteria da 24 V 6000 mAh + caricabatterie intelligente da 3 A | ||
| Sterzo | Servo digitale S20F coppia 20kg | WH060 Servo digitale con coppia di 60 kg | |
| Ruote | Ruote in gomma piena di diametro 125 mm | Ruote in gomma piena di diametro 150 mm | Ruote in gomma gonfiabili da 254 mm |
| Codificatore | Encoder ad alta precisione di fase 500 linee AB | ||
| Sistema di sospensione | Sistema di sospensione a pendolo coassiale | Sistema di sospensione indipendente da 4 W | |
| Interfaccia di controllo | App iOS e Android tramite Bluetooth o Wi-Fi, PS2, CAN, porta seriale, USB | ||
Introduzione dei controller ROS
Sono disponibili 2 tipi di controller ROS da utilizzare con RRobot sulla piattaforma Vidia Jetson. Jetson Orin Nano è più adatto alla ricerca e all'istruzione. Jetson Orin NX è ideale per la prototipazione di prodotti e applicazioni commerciali. La seguente tabella illustra le principali differenze tecniche tra i vari controller disponibili da Roboworks. Entrambe le schede consentono calcoli di alto livello e sono adatte ad applicazioni robotiche avanzate come computer vision, deep learning e motion planning.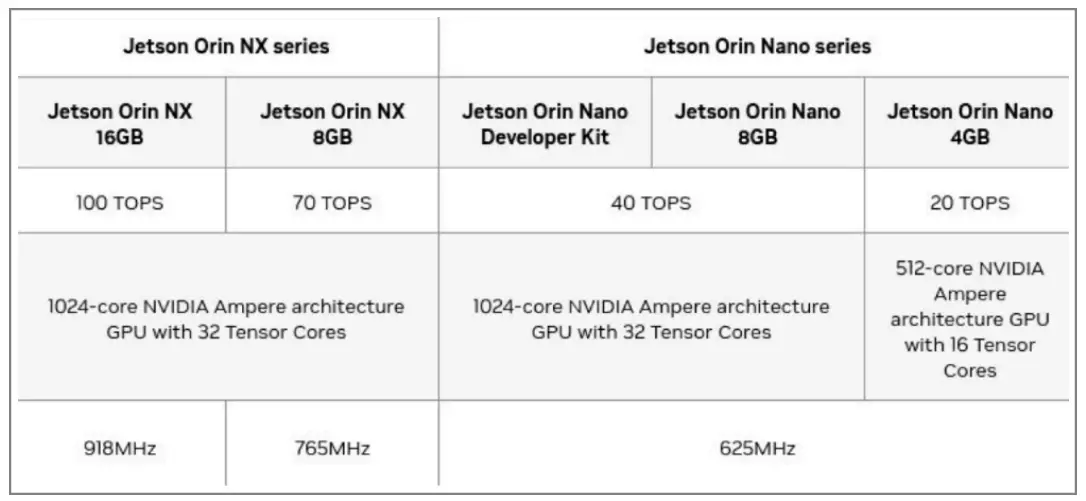
Sistema di rilevamento: LiDAR e telecamera di profondità
Un Leishen LSLiDAR è installato su tutte le varianti di Rosbot con il modello N10 o M10 in uso. Questi LLiDAR offrono una scansione di 3360-3360 gradi e una percezione dell'ambiente circostante e vantano un ESI compatto e leggero. Hanno un elevato rapporto segnale rumore ed eccellenti prestazioni di rilevamento su oggetti altamente/poco riflettenti e funzionano bene in condizioni di luce intensa. Hanno un raggio di rilevamento di 30 metri e una frequenza di scansione di 12 Hz. Questo LiDAR si integra perfettamente nei robot, assicurando che tutti gli usi di mappatura e navigazione possano essere facilmente ottenuti nel tuo progetto. La tabella seguente riassume le specifiche tecniche degli slider: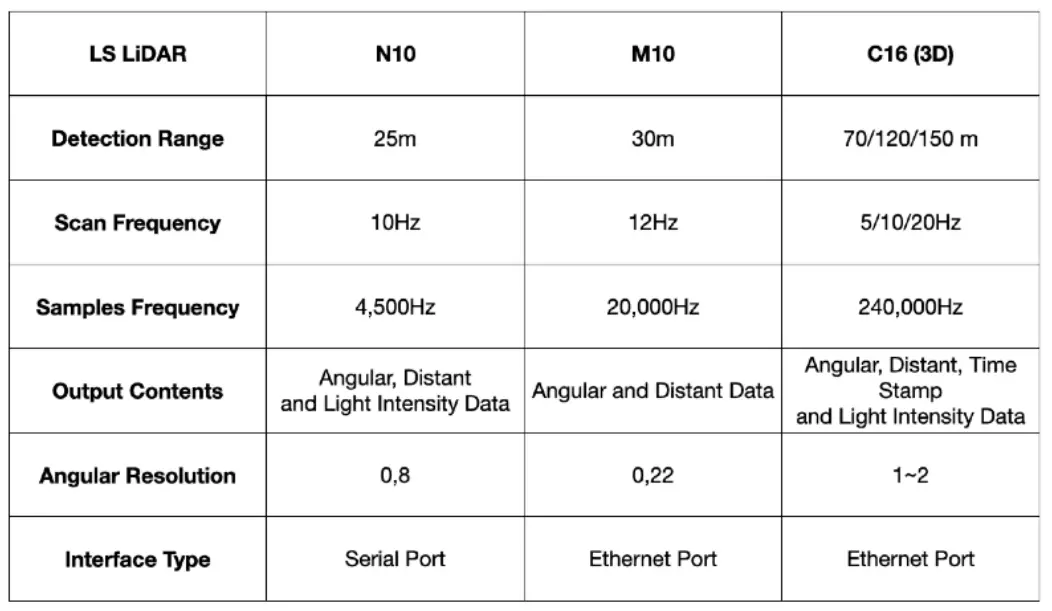
Inoltre, tutti i robot sono dotati di una telecamera di profondità Orbbec Astra, che è una telecamera RGBD. Questa telecamera è ottimizzata per una gamma di utilizzi, tra cui il controllo dei gesti, il tracciamento dello scheletro, la scansione 3D e lo sviluppo di nuvole di punti. La seguente tabella riassume le caratteristiche tecniche della telecamera di profondità.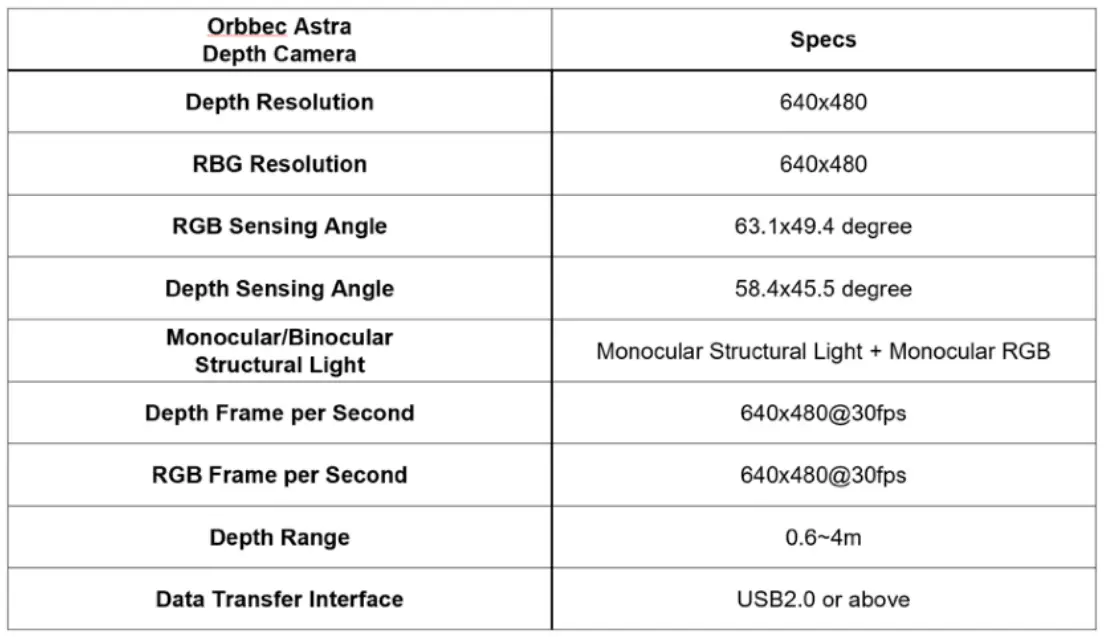
Scheda STM32 (controllo motore, gestione alimentazione e IMU)
La scheda STM32F103RC è il microcontrollore utilizzato in tutti i Rosbot. Ha un core ARM Cortex-M3 RISC a 32 bit ad alte prestazioni che opera a una frequenza di 72 MHz insieme a memorie integrate ad alta velocità. Funziona in un intervallo di temperatura da -40 °C a +105 °C, adattandosi a tutte le applicazioni robotiche nei climi di tutto il mondo. Ci sono modalità di risparmio energetico che consentono la progettazione di applicazioni a basso consumo. Alcune delle applicazioni di questo microcontrollore includono azionamenti motore, controllo applicazioni, applicazioni robotiche, apparecchiature mediche e portatili, periferiche per PC e giochi, piattaforme GPS, applicazioni industriali, videocitofoni per sistemi di allarme e scanner.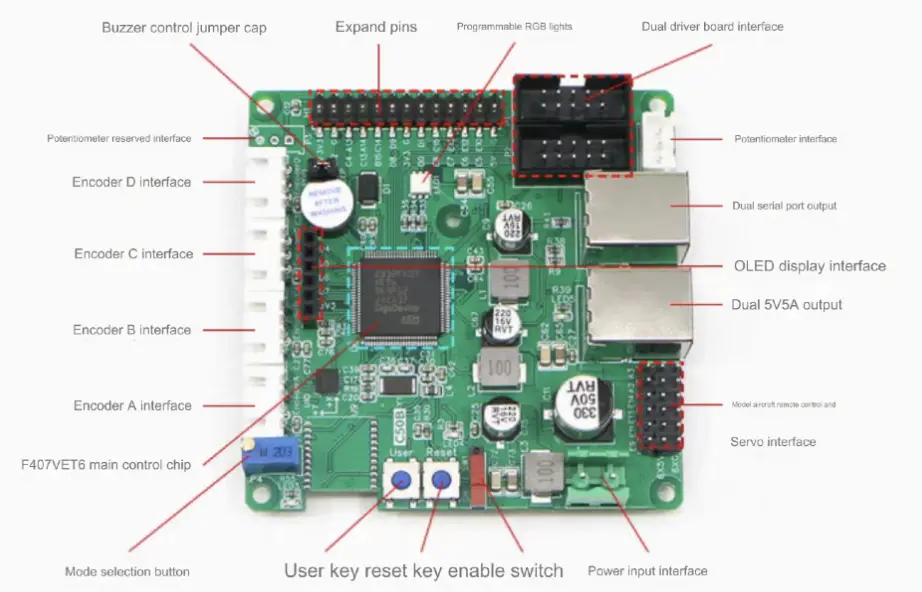
| STM32F103RC | Caratteristiche |
| Nucleo | CPU ARM32-bit Cortex –M3 Velocità massima di 72 MHz |
| Ricordi | 512 KB di memoria Flash 64kB di SRAM |
| Orologio, reset e gestione delle forniture | Alimentazione dell'applicazione da 2.0 a 3.6 V e I/O |
|
Energia |
Modalità di sospensione, arresto e standby
V alimentazione per RTC e registri di backup PIPISTRELLO |
| DMA | Controller DMA a 12 canali |
| Modalità di debug | SWD e JTAG interfacce Cortex-M3 Embedded Trace Macrocell |
| Porte I/O | 51 porte I/O (mappabili su 16 vettori di interrupt esterni e tolleranti a 5 V) |
|
Timer |
Timer 4 × 16 bit
2 timer PWM di controllo motore a 16 bit (con arresto di emergenza) 2 x timer watchdog (indipendenti e Window) Timer SysTick (contatore a 24 bit) 2 timer di base a 16 bit per pilotare il DAC |
|
Interfaccia di comunicazione |
Interfaccia USB 2.0 full-speed Interfaccia SDIO
Interfaccia CAN (2.0B Attivo) |
Sterzo e sistema di guida
Il sistema di sterzo e guida è integrato con la progettazione e la costruzione del robot. A seconda del modello acquistato, sarà a 2 o 4 ruote motrici, con entrambe le opzioni adatte a una varietà di scopi di ricerca e sviluppo. Le ruote su tutti i robot sono in gomma piena con pneumatici di grado di protezione dalla neve. C'è un sistema di sospensione a pendolo coassiale e i robot della gamma sono dotati di ammortizzatori con sistemi di sospensione indipendenti, assicurando che possano navigare con successo su terreni difficili.
Specifiche tecniche di sterzo e guida:
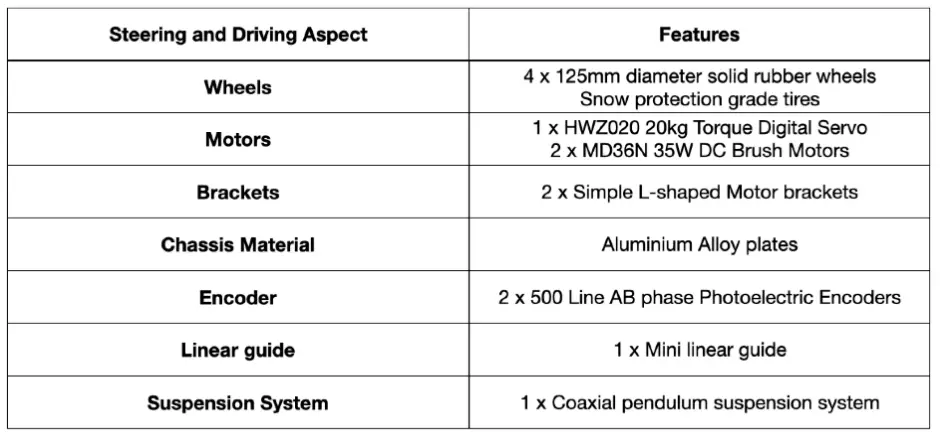
Diagramma di progettazione del telaio del robot:
Robotica 2

Robot professionista
Robot più
Gestione dell'alimentazione
Power Mag – Batteria magnetica LFP:
Tutti i Rosbot sono dotati di un Power Mag da 6000 mAh, una batteria magnetica LFP (Litio Ferro Fosfato) e un caricabatterie. I clienti possono aggiornare la batteria a 20000 mAh a un costo aggiuntivo. Le batterie LFP sono un tipo di batteria agli ioni di litio note per la loro stabilità, sicurezza e lunga durata del ciclo. A differenza delle tradizionali batterie agli ioni di litio, che utilizzano cobalto o nichel, le batterie LFP si basano sul ferro fosfato, offrendo un'alternativa più sostenibile e meno tossica. Sono altamente resistenti alla fuga termica, riducendo il rischio di surriscaldamento e incendio. Sebbene abbiano una densità energetica inferiore rispetto ad altre batterie agli ioni di litio, le batterie LFP eccellono in durata, con una durata maggiore, una ricarica più rapida e prestazioni migliori a temperature estreme, il che le rende ideali per veicoli elettrici (EV) e sistemi di accumulo di energia. Power Mag può essere attaccato a qualsiasi superficie metallica di un robot grazie al design della sua base magnetica. Rende la sostituzione delle batterie rapida e semplice.
Specifiche tecniche:
| Modello | 6000 mAh | 20000 mAh |
| Pacco batteria |
22.4 V 6000 mAh |
22.4 V 20000 mAh |
|
Materiale del nucleo |
Litio ferro fosfato |
Litio ferro fosfato |
| Volume di tagliotage | 16.5 Volt | 16.5 Volt |
|
Volume completotage |
25.55 Volt |
25.55 Volt |
| Corrente di carica | 3A | 3A |
| Materiale del guscio |
Metallo |
Metallo |
| Prestazioni di scarico | Scarica continua 15A | Scarica continua 20A |
|
Tappo |
Connettore femmina DC4017MM (carica) Connettore femmina XT60U-F (scarica) |
Connettore femmina DC4017MM (carica) Connettore femmina XT60U-F (scarica) |
|
Misurare |
177*146*42mm |
208*154*97mm |
|
Peso |
1.72 kg |
4.1 kg |
Protezione della batteria
Protezione da cortocircuito, sovracorrente, sovraccarico, scarica eccessiva, supporto della carica durante l'uso, valvola di sicurezza integrata, scheda ignifuga.
Stazione di ricarica automatica (Power+):
La stazione di ricarica automatica è in dotazione con il modello Rosbot 2+ e può essere acquistata separatamente per funzionare con Rosbot 2, Rosbot Pro e Rosbot Plus.
Avvio rapido ROS 2
Quando il robot viene acceso per la prima volta, è controllato da ROS per impostazione predefinita. Ciò significa che la scheda controller dello chassis STM32 accetta comandi dal controller ROS 2, il Jetson Orin. La configurazione iniziale è rapida e semplice, dal tuo PC host (si consiglia Ubuntu Linux) connettiti all'hotspot Wi-Fi del robot. La password di default è "Dongguan". Quindi, connettiti al robot tramite SSH tramite il terminale Linux l, l'indirizzo P è 192.168.0.10 e 0 e la password di default è Dongguan.
Con l'accesso terminale al robot, puoi navigare nella cartella dell'area di lavoro ROS 2, sotto "wheeltec_ROS 2" Prima di eseguire i programmi di test, naviga su wheeltec_ROS 2/turn_on_wheeltec_robot/ e individua wheeltec_udev.sh – Questo script deve essere eseguito, in genere solo una volta per garantire la corretta configurazione delle periferiche. Ora puoi testare la funzionalità del robot, per avviare la funzionalità del controller ROS 2, esegui: "relaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch"
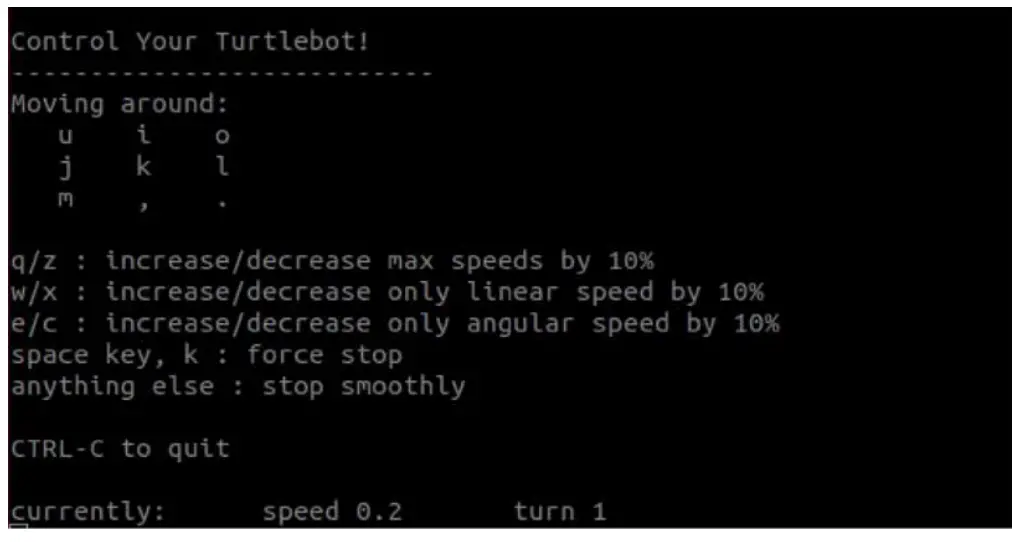
In un secondo terminale, puoi usare il nodo keyboard_teleop per convalidare il controllo dello chassis, questa è una versione modificata del popolare ROS 2 Turtlebot example. Digitare: “riavvia wheeltec_robot_rc keyboard_teleop.launch”
Pacchetti Humble ROS 2 preinstallati
Di seguito sono riportati i seguenti pacchetti orientati all'utente; potrebbero essere presenti altri pacchetti, ma si tratta solo di dipendenze.
- accendi_il_robot_wheeltec
Questo pacchetto è fondamentale per abilitare la funzionalità del robot e la comunicazione con il controller del telaio. Lo script primario "turn_on_wheeltec_robot.launch" deve essere utilizzato a ogni avvio per configurare ROS 2 e il controller. - ruotatec_rviz2
Contiene il lancio fileper avviare viz con configurazione personalizzata per Pickerbot Pro. - Sbattere il robot_wheeltec
Pacchetto di localizzazione e mappatura SLAM con una configurazione personalizzata per Pickerbot Pro. - robot_ruota_rrt2
Algoritmo di esplorazione rapida dell'albero casuale: questo pacchetto consente a Pickerbot Pro di pianificare un percorso verso la posizione desiderata, avviando nodi di esplorazione. - tastiera_robot_wheeltec
Pacchetto pratico per convalidare la funzionalità del robot e controllarlo tramite tastiera, anche da PC host remoto. - ruota_robot_nav2
Pacchetto ROS 2 Navigation a 2 nodi. - ruota_lidar_ros2
Pacchetto ROS 2 Lidar per la configurazione di Leishen M10/N10. - gioia_della_ruota
Il pacchetto di controllo del joystick contiene il lancio files per nodi Joystick. - semplice_follower_ros2
Algoritmi di base per il tracciamento di oggetti e linee mediante scansione laser o telecamera di profondità. - ros2_astra_camera
Pacchetto telecamera di profondità Astra con driver e lancio files.
Riepilogo
Robot è progettato per sviluppatori ROS (Robot Operating System), educatori e studenti. Il cuore di Rosbot è il framework software completamente programmabile e l'architettura hardware configurabile basata sulla piattaforma robotica più popolare: ROS.
Il robot si divide in tre categorie:
- Robot 2 – Adatto ai principianti di ROS e ai progetti a basso budget.
- Robot Professionista – Adatto a sviluppatori ed educatori ROS che necessitano di un sistema versatile per la prototipazione rapida o l'insegnamento.
- Rosbot Plus – Questa è la versione 4WD di Rosbot con sistemi di sospensioni indipendenti. Questa categoria è abbastanza seria da essere presa in considerazione per lo sviluppo industriale e commerciale. Il robot è dotato di controller ROS popolari come:
- Jetson Orin Nano
- Jetson Orin NX
Preparato da: Wayne Liu, Reilly Smithers e Tara Hercz 30 settembre 2024
Versione #: 20240930
Documenti / Risorse
 |
ROBOWORKS N10 Robot educativo programmabile Robot mobile [pdf] Manuale d'uso N10 Robot Educativo Programmabile Mobile Robot, N10, Robot Educativo Programmabile Mobile Robot, Educativo Programmabile Mobile Robot, Robot Mobile Programmabile, Robot Mobile, Robot |