BUNKER professionista
Squadra di robotica Agile X
Manuale utente V.1.0.0 2021.10

Robot mobile cingolato Bunker Pro
Questo capitolo contiene importanti informazioni sulla sicurezza, prima che il robot venga acceso per la prima volta, qualsiasi persona o organizzazione deve leggere e comprendere queste informazioni prima di utilizzare il dispositivo. Se hai domande sull'uso, ti preghiamo di contattarci all'indirizzo support@agilex.ai. Si prega di seguire e implementare tutte le istruzioni di montaggio e le linee guida nei capitoli di questo manuale, che è molto importante. Particolare attenzione dovrebbe essere prestata al testo relativo ai segnali di avvertimento.
![]() Informazioni importanti sulla sicurezza
Informazioni importanti sulla sicurezza
Le informazioni contenute nel presente manuale non includono la progettazione, l'installazione e il funzionamento di un'applicazione robotica completa, né includono tutte le periferiche che possono influire sulla sicurezza di questo sistema completo. La progettazione e l'utilizzo del sistema completo devono essere conformi ai requisiti di sicurezza stabiliti dalle norme e dai regolamenti del paese in cui è installato il robot. Gli integratori e i clienti finali di BUNKERPRO hanno la responsabilità di garantire la conformità alle disposizioni pertinenti e alle leggi e ai regolamenti pratici e di garantire che non vi siano rischi maggiori nell'applicazione completa del robot. Ciò include ma non è limitato a quanto segue:
1. Efficacia e responsabilità
- Effettuare una valutazione dei rischi dell'intero sistema robotico.
- Collegare insieme i dispositivi di sicurezza aggiuntivi di altri macchinari definiti dalla valutazione del rischio.
- Verificare che la progettazione e l'installazione delle periferiche dell'intero sistema robotico, compresi i sistemi software e hardware, siano corrette.
- Questo robot non dispone delle funzioni di sicurezza pertinenti di un robot mobile autonomo completo, inclusi, a titolo esemplificativo ma non esaustivo, anti-collisione automatica, anti-caduta, avviso di avvicinamento di creature, ecc. Le funzioni pertinenti richiedono agli integratori e ai clienti finali di condurre una valutazione della sicurezza in conformità con disposizioni pertinenti e leggi e regolamenti applicabili per garantire che il robot sviluppato sia privo di rischi importanti e pericoli nascosti nell'applicazione pratica.
- Raccogliere tutti i documenti nel tecnico file: compresa la valutazione dei rischi e il presente manuale.
- Conoscere i possibili rischi per la sicurezza prima di mettere in funzione e utilizzare l'apparecchiatura.
2. Ambiente
- Per il primo utilizzo, leggere attentamente questo manuale per comprendere il contenuto delle operazioni di base e le specifiche operative.
- Scegli un'area relativamente aperta per il controllo remoto, poiché il veicolo stesso non dispone di sensori automatici per evitare gli ostacoli.
- Utilizzare a una temperatura ambiente di -20-60.
- Se il veicolo non personalizza individualmente il livello di protezione IP, la sua capacità impermeabile e antipolvere è IP66.
3. Controllare
- Assicurarsi che ogni apparecchiatura abbia una carica sufficiente.
- Assicurarsi che il veicolo non presenti anomalie evidenti.
- Verificare se la batteria del telecomando è sufficientemente carica.
- Assicurarsi che l'interruttore di arresto di emergenza sia stato rilasciato durante l'utilizzo.
4. Funzionamento
- Assicurarsi che l'area circostante sia relativamente aperta durante il funzionamento.
- Telecomando all'interno della linea di vista.
- Il carico massimo di BUNKERPRO è di 120 kg. Quando è in uso, assicurarsi che il carico utile non superi i 120 kg.
- Quando si installa un'estensione esterna per BUNKERPRO, confermare il centro di massa dell'estensione e assicurarsi che sia al centro di rotazione.
- Quando l'attrezzatura voltage è inferiore a 48 V, si prega di caricarlo in tempo.
- Quando l'apparecchiatura è anormale, interrompere immediatamente l'utilizzo per evitare danni secondari.
- Quando l'apparecchiatura è anormale, contattare il personale tecnico competente e non maneggiarla senza autorizzazione.
- Utilizzare in un ambiente che soddisfi i requisiti del livello di protezione in base al livello di protezione IP dell'apparecchiatura.
- Non spingere direttamente il veicolo.
- Durante la ricarica, assicurarsi che la temperatura ambiente sia superiore a 0°C.
5. Manutenzione
- Controllare regolarmente la tensione del binario sospeso e stringere il binario ogni 150~200H.
- Ogni 500 ore di funzionamento controllare la bulloneria di ogni parte della carrozzeria. I Serrarli immediatamente se sono allentati.
- Per garantire la capacità di accumulo della batteria, la batteria deve essere conservata sotto carica e la batteria deve essere caricata regolarmente se non viene utilizzata per un lungo periodo.
Introduzione a BUNKERPRO
BUNKERPRO è un veicolo a telaio cingolato per applicazioni industriali a tutto tondo. Ha le caratteristiche di funzionamento semplice e sensibile, ampio spazio di sviluppo, adatto per lo sviluppo e l'applicazione in una varietà di campi, sistema di sospensione indipendente, assorbimento degli urti per impieghi gravosi, forte capacità di arrampicata e capacità di salire le scale. Può essere utilizzato per lo sviluppo di robot speciali come robot per ispezione ed esplorazione, salvataggio ed EOD, tiro speciale, trasporto speciale, ecc., per risolvere soluzioni di movimento del robot.
Elenco prodotti
| Nome | Quantità |
| Corpo del robot BUNKER PRO | X1 |
| Caricabatteria (AC220V) | X1 |
| Spina maschio per aviazione (4 pin) | X1 |
| Trasmettitore telecomando FS (opzionale) | X1 |
| Modulo di comunicazione da USB a CAN | X1 |
Specifiche tecniche
| Tipi di parametri | Elementi | Valori |
| Dimensioni | Dimensioni | 1064mm*845mm*73mm |
| Altezza del telaio | 120mm | |
| Larghezza della carreggiata | 150mm | |
| Lunghezza | 740mm | |
| Peso | Peso | Circa 180 kg |
| Carico | 120 kg | |
| Batteria | Tipo | Batteria al litio |
| Capacità | 60AH | |
| Voltage | 48V | |
| Movimento | Massima capacità di arrampicata | 30° |
| Velocità massima | 1.5 m/s | |
| Raggio minimo di sterzata | Può ruotare sul posto | |
| Ostacolo massimo | 180mm | |
| Parametri del motore | Servo senza spazzole 2 × 1500 W motore | |
| Codificare i parametri del disco | 2500 linee | |
| Temperatura di esercizio | -20~60° | |
| Rapporto di riduzione | 1:7.5 | |
| Controllare | Modalità di controllo | Telecomando |
| Trasmettitore RC | 2.4G/distanza estrema 200M | |
| Interfaccia di comunicazione | POTERE |
Requisito per lo sviluppo
BUNKERPRO è dotato di telecomando FS in fabbrica e gli utenti possono controllare il telaio del robot mobile BUNKERPRO tramite telecomando per completare le operazioni di movimento e rotazione; BUNKERPRO è dotato di interfaccia CAN e gli utenti possono eseguire lo sviluppo secondario attraverso di essa.
Le basi
Questa sezione fornirà un'introduzione di base al telaio del robot mobile BUNKERPRO, in modo che utenti e sviluppatori abbiano una conoscenza di base del telaio BUNKERPRO.
1Istruzioni sulle interfacce elettriche
Le interfacce elettriche posteriori sono mostrate nella Figura 2.1, dove Q1 è l'interfaccia CAN e 48V power aviation, Q2 è l'interruttore di alimentazione, Q3 è l'interfaccia di ricarica, Q4 è l'antenna, Q5 e Q6 sono rispettivamente l'interfaccia di debug del driver e il principale controlla l'interfaccia di debug (non aperta verso l'esterno) e Q7 è l'interazione del display di alimentazione.

La definizione dell'interfaccia di comunicazione e alimentazione di Q1 è illustrata nella Figura 2-2.

| Pin No. | Tipo di pin | Funzione e Definizione | Osservazioni |
| 1 | Energia | VCC | Potenza positiva, voltage intervallo 23 – 29.2 V, max. corrente 10A |
| 2 | Energia | Terra | Potenza negativa |
| 3 | POTERE | CAN_H | Bus CAN alto |
| 4 | POTERE | POSSO | Bus CAN basso |
Figura 2.2 Definizione dei pin dell'interfaccia di estensione dell'aviazione posteriore
Istruzioni sul telecomando
Il telecomando FS è un accessorio opzionale per BUNKERPRO. I clienti possono scegliere in base alle reali esigenze. Il telecomando può controllare facilmente il telaio del robot universale BUNKERPRO. In questo prodotto, utilizziamo il design dell'acceleratore a sinistra. Fare riferimento alla Figura 2.3 per la sua definizione e funzione. Le funzioni dei pulsanti sono definite come segue: SWA, SWC e SWD sono temporaneamente disabilitati; SWB è il pulsante di selezione della modalità di controllo, composto in alto è la modalità di controllo dei comandi, composto al centro è la modalità di controllo remoto; S1 è il pulsante dell'acceleratore, che controlla il BUNKERPRO avanti e indietro; S2 controlla la rotazione, mentre POWER è il pulsante di accensione e puoi accendere il telecomando premendoli contemporaneamente. Va notato che SWA, SWB, SWC e SWD devono essere in alto quando il telecomando è acceso.

Figura 2.3 Schema schematico dei pulsanti del telecomando FS
Istruzioni su richieste di controllo e movimenti
Abbiamo impostato un sistema di riferimento di coordinate per veicoli mobili terrestri secondo lo standard ISO 8855 come mostrato nella Figura 2.4.

Come mostrato in Figura 2.4, la carrozzeria del veicolo di BUNKERPRO è parallela all'asse X del sistema di coordinate di riferimento stabilito.
Nella modalità di controllo remoto, spingere il joystick del telecomando S1 in avanti per spostarsi nella direzione positiva dell'asse X e spingere S1 all'indietro per spostarsi nella direzione negativa dell'asse X. Quando S1 è spinto al valore massimo, la velocità di movimento nella direzione positiva dell'asse X è il massimo, e quando è spinto al valore minimo, la velocità di movimento nella direzione negativa dell'asse X è il massimo; il joystick del telecomando S2 controlla la rotazione della carrozzeria del veicolo a sinistra e a destra. Quando S2 viene spinto a sinistra, la carrozzeria del veicolo ruota dalla direzione positiva dell'asse X alla direzione positiva dell'asse Y, e quando S2 viene spinto a destra, la carrozzeria del veicolo ruota dalla direzione positiva
direzione dell'asse X alla direzione negativa dell'asse Y. Quando S2 viene spinto a sinistra al valore massimo, la velocità lineare di rotazione in senso antiorario è il massimo, e quando S2 viene spinto a destra al valore massimo, la velocità lineare di rotazione in senso orario è il massimo. Nella modalità comando di controllo, il valore positivo della velocità lineare significa muoversi nella direzione positiva dell'asse X, e il valore negativo della velocità lineare significa muoversi nella direzione negativa dell'asse X; il valore positivo della velocità angolare significa che la carrozzeria del veicolo si sposta dalla direzione positiva dell'asse X alla direzione positiva dell'asse Y, e il valore negativo della velocità angolare significa che la carrozzeria del veicolo si sposta dalla direzione positiva dell'asse Y Asse X nella direzione negativa dell'asse Y.
Uso e sviluppo
Questa sezione introduce principalmente il funzionamento e l'uso di base della piattaforma BUNKERPRO e come eseguire lo sviluppo secondario della carrozzeria del veicolo attraverso l'interfaccia CAN esterna e il protocollo CAN bus.
Uso e funzionamento
Controllo
- Verificare lo stato della carrozzeria del veicolo. Verificare se la carrozzeria del veicolo presenta anomalie evidenti; in tal caso, contattare l'assistenza post-vendita;
- Quando si utilizza per la prima volta, confermare se Q2 (interruttore di alimentazione) nel quadro elettrico posteriore è premuto; se non è premuto, premilo e rilascialo, quindi è nello stato rilasciato.
Avvio
- Premere l'interruttore di alimentazione (Q2 nel quadro elettrico); in circostanze normali, la spia dell'interruttore di alimentazione si accenderà e il voltmetro visualizzerà il volume della batteriatage normalmente;
- Controllare il volume della batteriatage. Se il volumetage è maggiore di 48V, significa che la batteria voltagè normale. Se il voltage è inferiore a 48 V, caricare; quando il voltage è inferiore a 46V, BUNKERPRO non può muoversi normalmente.
Fermare
- Premere l'interruttore di alimentazione per interrompere l'alimentazione;
Procedure operative di base del telecomando:
- Dopo aver avviato normalmente il telaio del robot BUNKERPRO, avviare il telecomando e selezionare la modalità di controllo remoto per controllare il movimento della piattaforma BUNKER PRO tramite il telecomando.
Ricarica
BUNKERPRO è dotato di un caricabatterie standard per impostazione predefinita, in grado di soddisfare le esigenze di ricarica dei clienti. Le modalità operative specifiche di ricarica sono le seguenti:
- Assicurarsi che il telaio BUNKERPRO sia in uno stato di spegnimento. Prima di caricare, assicurarsi che Q2 (interruttore di alimentazione) nella console elettrica posteriore sia spento; inserire la spina del caricabatterie nella
- Interfaccia di ricarica Q3 nel quadro elettrico posteriore;
- Collegare il caricabatterie all'alimentatore e accendere l'interruttore del caricabatterie per entrare nello stato di ricarica.
- Durante la ricarica per impostazione predefinita, non è presente alcuna spia sul telaio. Se è in carica o meno dipende dall'indicatore di stato del caricabatterie.
Sviluppo
BUNKERPRO fornisce un'interfaccia CAN per lo sviluppo dell'utente e l'utente può controllare la carrozzeria del veicolo attraverso questa interfaccia.
Lo standard di comunicazione CAN in BUNKERPRO adotta lo standard CAN2.0B; il baud rate di comunicazione è 500K e il formato del messaggio adotta il formato MOTOROLA. La velocità lineare del movimento e la velocità angolare della rotazione del telaio possono essere controllate tramite l'interfaccia CAN bus esterna; BUNKERPRO invierà in tempo reale le informazioni sullo stato del movimento corrente e le informazioni sullo stato del telaio BUNKERPRO.
Il protocollo include frame di feedback sullo stato del sistema, frame di feedback sul controllo del movimento e frame di controllo.
Il contenuto del protocollo è il seguente:
Il comando di feedback sullo stato del sistema include il feedback sullo stato attuale della carrozzeria del veicolo, il feedback sullo stato della modalità di controllo, il volume della batteriatage feedback e feedback di errore. Il contenuto del protocollo è riportato nella Tabella 3.1.
Tabella 3.1 Frame di feedback dello stato del sistema telaio BUNKERPRO
| Nome del comando | Comando di feedback sullo stato del sistema | |||
| Nodo di invio | Nodo ricevente | ID | Ciclo i ms ) | Ricevi timeout (ms) |
| Telaio Steer-by-wire | Il processo decisionale unità di controllo | 0x221 | 200 millisecondo | Nessuno |
| Lunghezza dei dati | 0x08 | |||
| Posizione | Funzione | Tipo di dati | Descrizione | |
| byte [0] | Stato attuale di carrozzeria del veicolo | int8 senza segno | 0x00 Sistema in condizioni normali Ox01 Modalità di arresto di emergenza 0x02 Eccezione di sistema | |
| byte f1] | Controllo della modalità | int8 senza segno | Ox00 Modalità standby Modalità di controllo del comando CAN Ox01 0x03 Modalità telecomando | |
| byte [2] byte [3] | Il volume della batteriatage è 8 bit in più v Il baafteryoltage è otto bit più in basso | non firmato int16 | Vol. effettivotagex 10 (con una precisione di 0.1 V) | |
| essere [4] byte [5] | Prenotato Fallimento informazioni | int8 senza segno | 0x0 Fare riferimento a [Descrizione delle informazioni sui guasti) | |
| byte [6] | Prenotato | – | Ox00 | |
| byte [7] | Controllo del conteggio (conteggio) | int8 senza segno | 0-255 conteggio cicli: ogni volta che viene inviata un'istruzione, il conteggio aumenterà una volta |
Tabella 3.2 Descrizione delle informazioni sui guasti
| Descrizione delle informazioni sul guasto | ||
| Byte | Morso | Senso |
| po' [0] | Livello batteria bassotage colpa | |
| po' [1] | Livello batteria bassotage avviso | |
| po' [2] | Protezione disconnessione telecomando (0: normale, 1: disconnessione telecomando) | |
| po' [3] | Errore di comunicazione del motore n. 1 (0: n errore 1: errore) | |
| po' [4] | Errore di comunicazione del motore n. 2 (0: n errore 1: errore) | |
| po' [5] | Riservato, predefinito 0 | |
| po' [6] | Riservato, predefinito 0 | |
| po' [7] | Riservato, predefinito 0 |
Il quadro di feedback del comando di controllo del movimento include il feedback della velocità lineare corrente e della velocità angolare della carrozzeria del veicolo in movimento. Il contenuto specifico del protocollo è mostrato nella Tabella 3.3.
Tabella 3.3 Quadro di feedback del controllo del movimento
| Nome del comando | Comando di feedback del controllo del movimento | |||
| Invio nodo | Nodo ricevente | ID | Ciclo (ms) | Ricevi timeout (ms) |
| Steer-by-wire telaio | Il processo decisionale unità di controllo | 0x221 | 20 millisecondo | Nessuno |
| Dati lunghezza | 0x08 | |||
| Posizione | Funzione | Tipo di dati | Descrizione | |
| byte [0] byte [1] | Il movimento la velocità è di 8 bit superiore Il movimento la velocità è inferiore di 8 bit | firmato int16 | Velocità effettiva × 1000 (con una precisione di 0.001 m/s) | |
| byte [2] byte [3] | La velocità di rotazione è superiore di 8 bit La velocità di rotazione è inferiore di 8 bit | firmato int16 | Velocità effettiva × 1000 (con una precisione di 0.001 rad/s) | |
| byte [4] | Prenotato | – | 0x00 | |
| byte [5] | Prenotato | – | 0x00 | |
| byte [6] | Prenotato | – | 0x00 | |
| byte [7] | Prenotato | – | 0x00 |
Il frame di controllo include l'apertura del controllo della velocità lineare, l'apertura del controllo della velocità angolare e il checksum. Il contenuto specifico del protocollo è riportato nella Tabella 3.4.
Tabella 3.4 Quadro di controllo del movimento
| Nome del comando | Modalità di controllo | |||
| Nodo di invio | Nodo ricevente | ID | Ciclo ( rns ) | Ricevi timeout (ms) |
| Il processo decisionale unità di controllo | Nodo del telaio | Ox111 | 20 millisecondo | Nessuno |
| Lunghezza dei dati | 0x08 | |||
| Posizione | Funzione | Tipo di dati | ||
| byte [0] byte [1) | La velocità lineare è otto bit più alta della velocità lineare è di otto bit inferiore | firmato int16 | Velocità di spostamento della carrozzeria del veicolo. unità: mrins, range [-1700,1700] | |
| byte [2] byte [3] | La velocità angolare è di otto bit superiore L'angolare la velocità è di otto bit inferiore | firmato int16 | Velocità angolare di rotazione della carrozzeria del veicolo, unità: 0.001 rad. intervallo [- 3140,3140) | |
| byte [4] | Prenotato | — | Ox00 | |
| byte [5] | Prenotato | — | Ox00 | |
| byte [6] | Prenotato | — | Ox00 | |
| byte [7] | Prenotato | — | Ox00 |
Il frame di impostazione della modalità viene utilizzato per impostare l'interfaccia di controllo del terminale. Il contenuto specifico del protocollo è mostrato nella Tabella 3.5
Tabella 3.5 Cornice di impostazione della modalità di controllo
| Nome del comando | Comando di impostazione della modalità di controllo | |||
| Nodo di invio | Nodo ricevente | ID | Ciclo ( ms ) | Ricevi timeout (ms) |
| Il processo decisionale unità di controllo | Telaio nodo | 0x421 | 20 millisecondo | 500 millisecondo |
| Lunghezza dei dati | Ox01 | |||
| Posizione | Funzione | Tipo di dati | Descrizione | |
| byte (01 | PUÒ controllare abilitare | int8 senza segno | Ox00 Modalità standby 0x01 Comando CAN abilitazione modalità |
Nota [1] Descrizione della modalità di controllo
Quando il telecomando di BUNKERPRO non è acceso, la modalità di controllo è la modalità standby per impostazione predefinita ed è necessario passare alla modalità di comando per inviare il comando di controllo del movimento. Se il telecomando è acceso, il telecomando ha la massima autorità e può schermare il controllo dei comandi. Quando il telecomando passa alla modalità di comando, deve ancora inviare il comando di impostazione della modalità di controllo prima di rispondere al comando di velocità.
Il riquadro di impostazione dello stato viene utilizzato per eliminare gli errori di sistema. Il contenuto specifico del protocollo è mostrato nella Tabella 3.6.
Tabella 3.6 Frame di impostazione dello stato
| Nome del comando | Comando di impostazione dello stato | |||
| Nodo di invio | Nodo ricevente | ID | Ciclo (ms) | Ricevi il timeout |
| Il processo decisionale unità di controllo | Nodo del telaio | 0x441 | Nessuno | Nessuno |
| Lunghezza dei dati | 0x01 | |||
| Posizione | Funzione | Tipo di dati | Descrizione | |
| byte [0] | Cancellazione dell'errore comando | int8 senza segno | 0x00 cancella tutti gli errori 0x01 Cancella errore motore 1 0x02 Cancella errore motore 2 |
Nota 3: Lampi dati; i seguenti dati sono solo a scopo di test
1. Il veicolo avanza alla velocità di 0.15/S
| byte [0] | byte [1] | byte [2] | byte [3] | byte [4] | byte [5] | byte [6] | byte [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
2. Il veicolo ruota a 0.2RAD/S
| byte [0] | byte [1] | byte [2] | byte [3] | byte [4] | byte [5] | byte [6] | byte [7] |
| 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 | 0x00 |
Oltre alle informazioni sullo stato del telaio, le informazioni di feedback del telaio includono anche i dati del motore e i dati del sensore.
Tabella 3.7 Retroazione delle informazioni sulla posizione corrente della velocità del motore
| Nome del comando | Telaio di feedback delle informazioni ad alta velocità dell'azionamento del motore | |||
| Nodo di invio | Nodo ricevente | ID | Ricevi tempo- fuori (ms) | |
| Telaio Steer-by-wire | Il processo decisionale unità di controllo | 0x251-0x254 | 20 millisecondo | Nessuno |
| Dati lunghezza | Ox08 | |||
| Posizione | Funzione | – | Descrizione | |
| byte [0] byte [1] | La velocità del motore è più alta di 8 bit La velocità del motore è più bassa di 8 bit | firmato int16 | Attuale velocità del motore Giri unità | |
| byte [2] | Prenotato | – | Ox00 | |
| byte [3] | La guida temperatura è di 8 bit inferiore | – | Unità 1 t | |
| byte [4] | Prenotato | – | Ox00 | |
| byte [5] | Stato dell'unità | – | Vedere la Tabella 3.9 per i dettagli | |
| byte [6] | Prenotato | – | Ox00 | |
| byte [7] | Prenotato | – | 0x00 |
Tabella 3.8 Temperatura del motore, voltage e feedback sulle informazioni sullo stato
| Nome del comando | Frame di feedback delle informazioni sulla bassa velocità dell'azionamento del motore | ||
| Invio I Ricezione nodo nodo | ID | Ciclo :ms) | Ricevi timeout (ms) |
| Steer-by-Dedsion- controllo della realizzazione del filo | unità telaio 0x261-0x264 | Nessuno | Nessuno |
| Lunghezza dati 0x08 | |||
| Posizione I Funzione | Descrizione | ||
| byte [0] byte [1] | Prenotato Prenotato | Bue00 0x00 | |
| byte [2] byte [3] | La temperatura dell'unità è 8 bit più alti La temperatura dell'unità è inferiore di 8 bit | firmato int16 | Unità 1℃ |
| byte [4] | Prenotato | Ox00 | |
| byte [5] | Stato dell'unità | int8 senza segno | Vedi tabella 3.9 per i dettagli |
| byte [6] | Prenotato | – | Ox00 |
| byte [7] | Prenotato | – | 0x00 |
Tabella 3.9 Stato unità
| Byte | Morso | Descrizione |
| byte [5] | po' [0] | Se l'alimentatore voltage è troppo basso (0:Normale 1:Troppo basso) |
| po' [1] | Se il motore è surriscaldato (0: normale 1: surriscaldato) | |
| po' [2] | Prenotato | |
| po' [3] | Prenotato | |
| po' [4] | Prenotato | |
| po' [5] | Prenotato | |
| po' [6] | Prenotato | |
| po' [7] | Prenotato |
Tabella 3.10 Frame feedback contachilometri
| Nome del comando | Quadro di feedback delle informazioni sul contachilometri | |||
| Invio nodo | Nodo ricevente | ID | Ciclo ( ms ) | Ricevi timeout (ms) |
| Steer-by- telaio | Il processo decisionale unità di controllo | 0x311 | 20 millisecondo | Nessuno |
| Lunghezza dei dati | Ox08 | |||
| Posizione | Funzione | Tipo di dati | Descrizione | |
| byte [0] byte [1] byte [2] byte [3] | Bit più alto del contachilometri ruota sinistra Secondo bit più alto del contachilometri ruota sinistra Il secondo bit più basso del contachilometri ruota sinistra La parte più bassa del contachilometri della ruota sinistra | firmato int32 | Contachilometri ruota sinistra telaio Unità: mm | |
| byte [4] byte [5] byte [6] byte 17) | Pezzo più alto di destra contachilometri ruota Il secondo bit più alto del contachilometri ruota destra Seconda parte più bassa del contachilometri ruota destra Pezzo più basso di destra contachilometri ruota | firmato int32 Unità: mm | Contachilometri ruota destra telaio feedback |
Tabella 3.11 Feedback delle informazioni sul telecomando
| Nome del comando | Informazioni sul telecomando | |||
| Nodo di invio | Nodo ricevente | ID | Ciclo ( ms / | Ricevi timeout (ms) |
| Steer-by-wire telaio | Il processo decisionale unità di controllo | 0x241 | 20 millisecondo | Nessuno |
| Dati lunghezza | 0x08 | |||
| Posizione | Funzione | Tipo di dati | Descrizione | |
| byte [0] | Telecomando SW feedback | int8 senza segno | bit[0-1]: SWA 2 su 3 giù bit[2-3]: SWB: 2-Su 1-Medio 3-Giù bit14-51: SWC: 2-Su 1-Medio 3-Giù bit[6-71: SWD: 2 su 3 giù | |
| hY1e [1] | Leva destra sinistra a | firmato int8 | Intervallo: (-100.100) | |
| byte [2] | Leva destra sinistra e destra | firmato int8 | Intervallo:[-100.100] | |
| byte [3] | Leva sinistra su e giù | firmato int8 | Intervallo: (-100.100] | |
| byte [4] | Leva sinistra sinistra e destra | firmato int8 | Intervallo: (-100.100] | |
| byteISI | Manopola sinistra VRA | firmato int8 | Intervallo: (-100.100) | |
| byte [6] | Prenotato | — | 0x00 | |
| byte (71 | Controllo del conteggio | int8 senza segno | Conteggio cicli 0-255 |
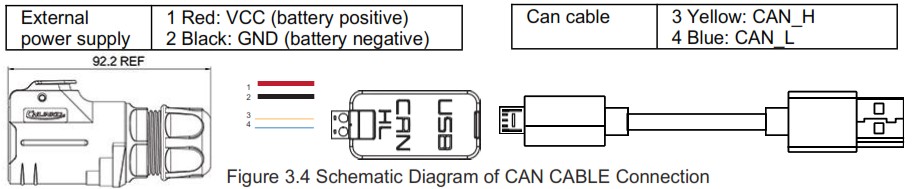
Connessione via cavo CAN
BUNKERPRO viene spedito con un connettore maschio a spina aeronautica come mostrato nella Figura 3.2. La definizione del cavo: il giallo è CANH, il blu è CANL, il rosso è l'alimentazione positiva e il nero è l'alimentazione negativa.
Nota: nell'attuale versione BUNKERPRO, l'interfaccia di estensione esterna è aperta solo all'interfaccia posteriore. In questa versione l'alimentatore può fornire una corrente massima di 10A.

Realizzazione del controllo dei comandi CAN
Avvia normalmente il telaio del robot mobile BUNKERPRO, accendi il telecomando FS, quindi cambia la modalità di controllo in controllo di comando, ovvero ruota la selezione della modalità SWB del telecomando FS in alto. A questo punto, il telaio BUNKERPRO accetterà il comando dall'interfaccia CAN e l'host può anche analizzare lo stato corrente del telaio attraverso i dati in tempo reale restituiti dal bus CAN allo stesso tempo. Fare riferimento al protocollo di comunicazione CAN per il contenuto specifico del protocollo.
Aggiornamento firmware (non ancora aperto)
Per facilitare agli utenti l'aggiornamento della versione del firmware utilizzata da BUNKERPRO e offrire ai clienti un'esperienza più completa, BUNKERPRO è dotato di un'interfaccia hardware per l'aggiornamento del firmware e del software client corrispondente. L'interfaccia client è mostrata nella Figura 3.3.
Preparazione all'aggiornamento
- Cavo seriale X 1
- USB alla porta seriale X 1
- Telaio BUNKERPRO X 1
- Computer (sistema operativo WINDOWS) X 1
Software per l'aggiornamento del firmware - https://github.com/agilexrobotics/agilex_firmware
- Assicurarsi che l'alimentazione del telaio del robot sia scollegata prima del collegamento;
- Utilizzare il cavo seriale per connettersi alla porta seriale di aggiornamento del telaio BUNKERPRO (richiede lo smontaggio del quadro elettrico posteriore); collegare il cavo seriale al computer;
- Apri il software client;
- Seleziona il numero di porta;
- Accendi lo chassis UNKERPRO e fai clic su "Avvia connessione" immediatamente (lo chassis attenderà 3 secondi prima di accendersi; se il tempo supera i 6 secondi, entrerà nell'applicazione); se la connessione ha esito positivo, la casella di testo richiederà "Connesso con successo";
- Caricare il cestino file;
- Fare clic sul pulsante Aggiorna e attendere la richiesta di completamento dell'aggiornamento;
- Scollegare il cavo seriale, spegnere lo chassis e riaccenderlo.

Figura 3.3 Interfaccia client dell'aggiornamento del firmware
BUNKERPRO ROS Confezione Uso Esample
ROS fornisce alcuni servizi standard del sistema operativo, come l'astrazione dell'hardware, il controllo delle apparecchiature di basso livello, l'implementazione di funzioni comuni, la gestione dei messaggi tra processi e dei pacchetti di dati. ROS si basa su un'architettura a grafo, in modo che i processi di diversi nodi possano ricevere, rilasciare e aggregare varie informazioni (come rilevamento, controllo, stato, pianificazione, ecc.). Attualmente ROS supporta principalmente UBUNTU.
Preparazione allo sviluppo
Preparazione dell'hardware
- CAN luce può modulo di comunicazione X1
- Think pad E470 notebook X1 Telaio robot mobile AGILEX BUNKERPRO X1
- AGILEX BUNKERPRO che supporta il telecomando FS-i6s X1
- AGILEX BUNKERPRO presa per aviazione superiore X1
Usa example descrizione dell'ambiente
- Ubuntu 16.04 LTS(Questa è una versione di prova, testata su Ubuntu 18.04 LTS)
- ROS Kinetic(Verranno testate anche le versioni successive)
- Incitare
Collegamento e preparazione dell'hardware
- Estrarre il cavo CAN della spina aeronautica superiore BUNKERPRO o della spina posteriore e collegare rispettivamente CAN_H e CAN_L nel cavo CAN all'adattatore CAN_TO_USB;
- Accendi l'interruttore a manopola sul telaio del robot mobile BUNKERPRO e controlla se gli interruttori di arresto di emergenza su entrambi i lati sono rilasciati;
- Collegare CAN_TO_USB all'interfaccia USB del notebook. Lo schema di collegamento è mostrato in Figura 3.4.
Installazione del ROS e impostazione dell'ambiente
Per i dettagli sull'installazione, fare riferimento a http://wiki.ros.org/kinetic/Installa-tion/Ubuntu
Testare l'hardware CANABLE e la comunicazione CAN
Impostare l'adattatore CAN-TO-USB
- Abilita il modulo del kernel gs_usb $ sudo modprobe gs_usb
- Imposta la velocità di trasmissione di 500k e abilita l'adattatore can-to-usb $ sudo ip link set can0 up type can bitrate 500000
- Se non si sono verificati errori nei passaggi precedenti, dovresti essere in grado di utilizzare il comando to view l'attrezzatura può immediatamente $ ifconfig -a
- Installa e usa can-utils per testare l'hardware $ sudo apt install can-utils
- Se questa volta il can-to-usb è stato collegato al robot BUNKERPRO e il veicolo è stato acceso, utilizzare i seguenti comandi per monitorare i dati dal telaio BUNKERPRO $ candump can0
- Fonti di riferimento:
[1]https://github.com/agilexrobotics/agx_sdk
[2]https://wiki.rdu.im/_pages/Notes/Embed-dedSystem/Linux/can-bus-in-linux.html - Scarica il pacchetto dipendente da ros
PACCHETTO AGILEX BUNKERPRO ROS scarica e compila
$ sudo apt install ros-$ROS_DISTRO-teleop-twist-tastiera
$ sudo apt installa libasio-dev
• Clonare e compilare il codice sorgente di bunker_ros
$ cd ~/catkin_ws/src
$ git clone https://github.com/agilexrobotics/ugv_sdk.git
$ git clone https://github.com/agilexrobotics/bunker_ros.git
$cd..
$ amento_make
Fonte di riferimento:
https://github.com/agilexrobotics/bunker_ros
Avvia i nodi ROS
- Avvia il nodo di base
$ roslaunch bunker_bringup bunker_minimal.launch - Avviare il nodo operativo remoto della tastiera
$ roslaunch bunker_bringup bunker_teleop_keyboard.launch
Precauzioni
Questa sezione contiene alcune precauzioni per l'utilizzo e lo sviluppo di BUNKERPRO.
Precauzioni per la batteria
- Quando BUNKERPRO lascia la fabbrica, la batteria non è completamente carica. La potenza specifica della batteria può essere visualizzata attraverso il voltage indicatore di visualizzazione sul retro del telaio BUNKERPRO o letto attraverso l'interfaccia di comunicazione CAN bus;
- Si prega di non caricare la batteria dopo che la sua potenza è esaurita. Si prega di caricarlo in tempo quando il vol bassotage nella parte posteriore del BUNKERPRO è inferiore a 48V; Condizioni di conservazione statica: la migliore temperatura per la conservazione della batteria è -10°C~45°C; in caso di stoccaggio per non utilizzo, la batteria deve essere ricaricata e scaricata una volta ogni 1 mese circa, quindi conservata a pieno volumetagproprietà. Si prega di non mettere la batteria nel fuoco o riscaldare la batteria, e si prega di non conservare la batteria in un ambiente ad alta temperatura;
- Ricarica: la batteria deve essere caricata con un caricabatteria al litio dedicato. Non caricare la batteria al di sotto di 0°C e non utilizzare batterie, alimentatori e caricabatterie non standard.
Precauzioni per l'ambiente operativo
- La temperatura operativa di BUNKERPRO è di 20 ℃ ~ 60 ℃; si prega di non utilizzarlo in ambienti in cui la temperatura è inferiore a 20 ℃ o superiore a 60 ℃;
- I requisiti di umidità relativa dell'ambiente operativo di BUNKERPRO sono: massimo 80%, minimo 30%;
- Si prega di non utilizzarlo in un ambiente con gas corrosivi e infiammabili o in un ambiente vicino a sostanze infiammabili;
- Non conservarlo vicino a elementi riscaldanti come riscaldatori o grandi resistori a spirale;
- Si raccomanda che l'altitudine dell'ambiente operativo non superi i 1000M; Si raccomanda che la differenza di temperatura tra il giorno e la notte nell'ambiente operativo non superi i 25°C;
- Ispezionare e mantenere regolarmente la ruota tendicinghia.
Precauzioni per estensione esterna elettrica
- La corrente dell'alimentatore di estensione posteriore non deve superare i 10 A e la potenza totale non deve superare i 480 W;
Precauzioni di sicurezza
- In caso di dubbi durante l'uso, seguire il relativo manuale di istruzioni o consultare il relativo personale tecnico;
- Prima dell'uso, prestare attenzione alle condizioni del campo ed evitare operazioni errate che potrebbero causare problemi di sicurezza del personale;
- In caso di emergenza, premere il pulsante di arresto di emergenza e spegnere l'apparecchiatura;
- Senza supporto tecnico e autorizzazione, si prega di non modificare personalmente la struttura dell'apparecchiatura interna.
Altre precauzioni
- Non far cadere o capovolgere il veicolo durante il trasporto e l'installazione;
- Per i non professionisti, si prega di non smontare il veicolo senza autorizzazione.
Domande e risposte
– Innanzitutto, confermare se l'interruttore di alimentazione è premuto; quindi confermare se la modalità di controllo selezionata tramite l'interruttore di selezione della modalità nella parte superiore sinistra del telecomando è corretta.
– In circostanze normali, se BUNKERPRO può essere controllato dal telecomando, significa che il controllo del movimento del telaio è normale; se può ricevere il frame di feedback del telaio, significa che il collegamento di estensione CAN è normale. Verificare se il comando è passato alla modalità di controllo della lattina.
– BUNKERPRO ha un meccanismo di protezione della comunicazione all'interno. Il telaio è dotato di un meccanismo di protezione dal timeout durante l'elaborazione dei comandi di controllo CAN dall'esterno. Supponiamo che dopo che il veicolo riceve un frame del protocollo di comunicazione, ma non riceve il frame successivo del comando di controllo per più di 500 MS, entrerà nella protezione della comunicazione e la sua velocità è 0. Pertanto, i comandi dal computer host devono essere rilasciato periodicamente.
Dimensioni del prodotto
Schema illustrativo delle dimensioni del prodotto


Schema illustrativo delle dimensioni del supporto esteso superiore

AgileX Robotica (Dongguan) CO., Ltd.
WWW.AGILEX.AI
TEL: + 86-0769-22892150
CELLULARE: + 86-19925374409

Documenti / Risorse
 |
Robot mobile cingolato AgileX Bunker Pro [pdf] Manuale d'uso Bunker Pro Robot mobile cingolato, Bunker Pro, Robot mobile cingolato, Robot mobile |



