Kit encoder rotativo ad albero cavo Netzer Precision VLP-247 Encoder
Specifiche
- Risoluzione angolare: 18-20 bit
- Precisione della posizione nominale: ±0.006°
- Velocità massima operativa: 4,000 giri al minuto
- Campo di misura: Giro singolo, illimitato
- Direzione di rotazione: CW/CCW regolabile*
- BIT di test incorporato: Opzionale
- * Stessa direzione predefinita dal lato inferiore dell'encoder
Informazioni sul prodotto
Il kit encoder rotativo ad albero cavo assoluto VLP-247 è un encoder di precisione progettato per applicazioni in ambienti difficili. Basato sulla tecnologia capacitiva sviluppata da Netzer Precision Position Sensors, questo encoder è costruito per soddisfare i requisiti di applicazioni esigenti.
Istruzioni per l'uso del prodotto
Montaggio meccanico
Fare riferimento alla sezione Montaggio meccanico nel manuale utente per istruzioni dettagliate sul montaggio dell'encoder. Seguire le linee guida per l'installazione dell'estremità dell'albero per un'installazione corretta.
Modalità operativa
L'encoder funziona in modalità SSi/BiSS. Fare riferimento al manuale utente per istruzioni specifiche sulla configurazione e il funzionamento dell'encoder in queste modalità.
Domande frequenti
- D: Qual è la velocità operativa massima del VLP-247? codificatore?
A: La velocità massima operativa del codificatore VLP-247 è di 4,000 giri/min. - D: Da quanto tempo viene utilizzata la tecnologia capacitiva nel VLP? serie è stata sviluppata?
R: La tecnologia capacitiva utilizzata nella serie VLP è stata sviluppata e migliorata per oltre 20 anni da Netzer Precision Position Sensors.
Introduzione agli encoder VLP
Progettato per soddisfare i requisiti delle applicazioni più esigenti
La serie VLP di Electric Encoders™ è una linea di encoder progettati per applicazioni in ambienti difficili. Questi encoder si basano sulla tecnologia capacitiva sviluppata e migliorata da oltre 20 anni da Netzer Precision Position Sensors.
Gli encoder VLP sono caratterizzati dalle seguenti caratteristiche che li distinguono da altri encoder simili:
- Basso vantaggiofile
- Albero cavo (statore / rotore)
- Nessun cuscinetto o altri elementi di contatto
- Alta risoluzione e ottima precisione
- Immunità ai campi magnetici
- Elevata tolleranza a temperature estreme, urti, umidità, EMI, RFI
- Peso molto basso
- Generazione e rilevamento di segnali olistici
- Interfacce digitali per posizione assoluta
La struttura olistica del VLP Electric Encoder™ lo rende unico. La sua lettura di output è il risultato medio dell'intera area della circonferenza del rotore. Questa caratteristica di progettazione intrinseca fornisce al VLP encoder una precisione eccezionale e un montaggio meccanico tollerante. L'assenza di componenti quali cuscinetti a sfera, giunti flessibili, dischi di vetro, sorgenti luminose e rilevatori, insieme a un consumo energetico molto basso, consente agli encoder VLP di fornire prestazioni praticamente prive di guasti.
Specifiche tecniche
Generale
| Risoluzione angolare | 18-20 bit |
| Precisione della posizione nominale | ±0.006° |
| Massima velocità operativa | 4,000 giri al minuto |
| Campo di misura | Giro singolo, illimitato |
| Direzione di rotazione | CW/CCW regolabile* |
| BIT di prova integrato | Opzionale |
* Stessa direzione predefinita dal lato inferiore dell'encoder
Meccanico
| Eccentricità di montaggio consentita | ±0.1 millimetri |
| Tolleranza di montaggio assiale ammissibile | ±0.3 millimetri |
| Inerzia del rotore | 876,053 gr·mm2 |
| Peso totale | 220 grammi |
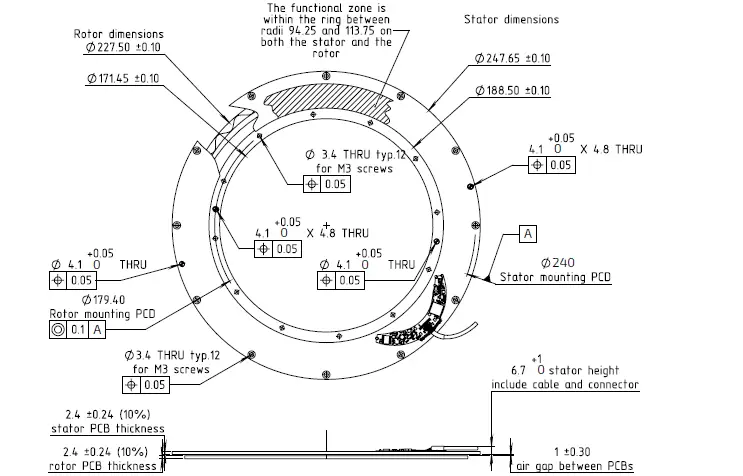
| Ø esterno / Ø interno / Altezza | 247 / 171 / 9 mm |
| Materiale (statore/rotore) | FR4 |
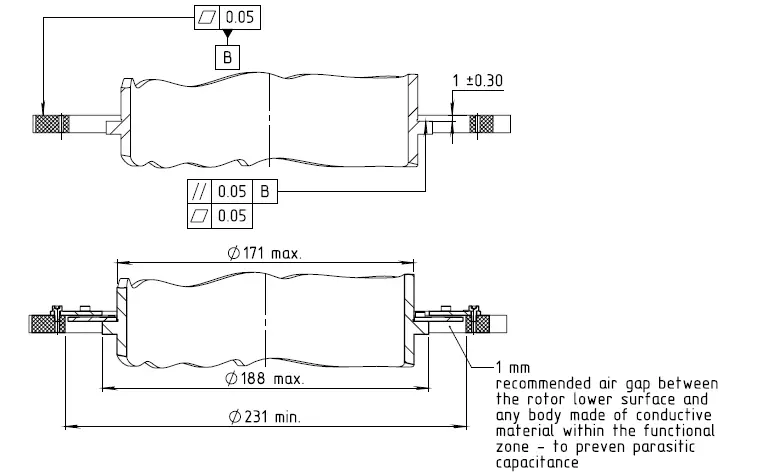
| Traferro nominale (statore, rotore) | 1 millimetri |
Elettrico
| Volume di fornituratage | 5 V ± 5% |
| Consumo attuale | ~90 mA |
| Interconnessione | Cavo (standard 250 mm) |
| Comunicazione | SSi, BiSS-C |
| Uscita seriale | Differenziale RS-422 |
| Frequenza di clock | Frequenza 0.1-5.0 MHz |
| Frequenza di aggiornamento della posizione | 35 kHz (opzionale - fino a 375 kHz) |
Ambientale
| Compatibilità elettromagnetica | CEI 6100-6-2, CEI 6100-6-4 |
| Temperatura di esercizio | da -40°C a +105°C |
| Temperatura di conservazione | da -55°C a +125°C |
| Umidità relativa | 98% senza condensa |
| Resistenza agli urti / funzionale | 100 g 6 msec a dente di sega secondo IEC 60068-2-27:2009 40 g 11 msec a dente di sega secondo MIL-810G |
| Vibrazione funzionale | 7.7 g da 20 a 2000 Hz per MIL-810G Categoria 24 |
| Protezione | Tipo di protezione IP40 |
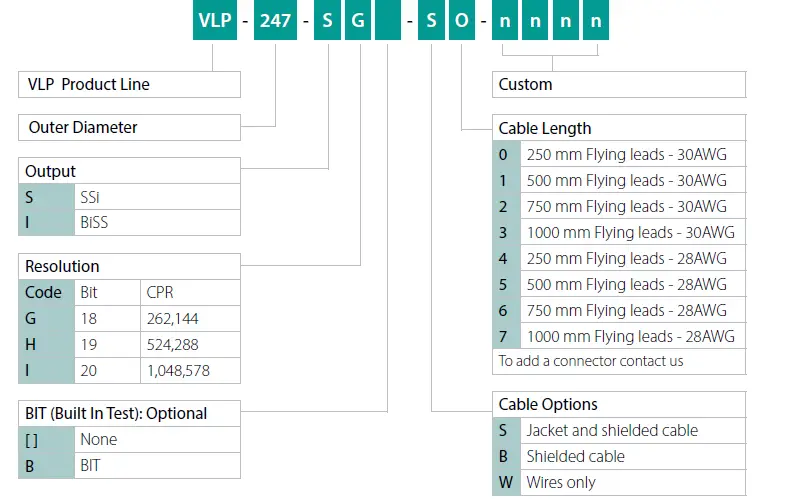
Codice di ordinazione
Disegni meccanici
Salvo diversa indicazione
- Le dimensioni sono in: mm Finitura superficiale: N6
Tolleranze lineari
- 0.5-4.9: ±0.05 mm 5-30: ±0.1 mm
- 31-120: ±0.15 mm 121-400: ±0.2 mm
Disegno di controllo dell'interfaccia meccanica
Opzioni cavo
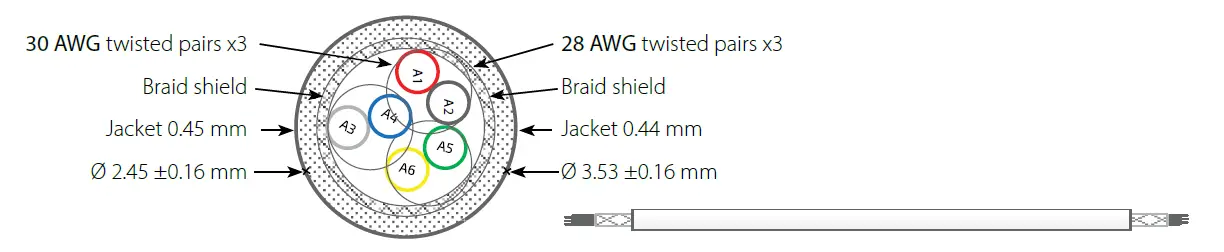
| Netzer Cat n. | CB00014 Cilindrata | CB00034 Cilindrata |
| Tipo di cavo | Doppino intrecciato 30 AWG x 3 | Doppino intrecciato 28 AWG x 3 |
| Tipo di filo | 2 x 30 AWG 25/44 rame stagnato Isolamento: PFE Ø 0.15 Diametro esterno: Ø 0.6 ± 0.05 mm |
2 x 30 AWG 40/44 rame stagnato Isolamento: PFE Ø 0.12 Diametro esterno: Ø 0.64 ± 0.05 mm |
| Temp. Valutazione | da -55°C a +150°C | |
| Scudo intrecciato | Rame diluito intrecciato 95% min. copertura | |
| Giacca | 0.45 gomma siliconica (NFA 11-A1) | 0.44 gomma siliconica (NFA 11-A1) |
| Diametro | Ø 2.45 ± 0.16 mm | Ø 3.53 ± 0.16 mm |
Stoccaggio e movimentazione
- Temperatura di stoccaggio: da -55°C a +125°C
- Umidità: fino a 98% senza condensa
Protezione ESD
Come di consueto per i circuiti elettronici, durante la manipolazione del prodotto non toccare circuiti elettronici, fili, connettori o sensori senza un'adeguata protezione ESD. L'integratore/operatore deve utilizzare apparecchiature ESD per evitare il rischio di danni al circuito.
 ATTENZIONE OSSERVARE LE PRECAUZIONI PER LA MANIPOLAZIONE DI DISPOSITIVI SENSIBILI ALLE ELETTROSTATICHE
ATTENZIONE OSSERVARE LE PRECAUZIONI PER LA MANIPOLAZIONE DI DISPOSITIVI SENSIBILI ALLE ELETTROSTATICHE
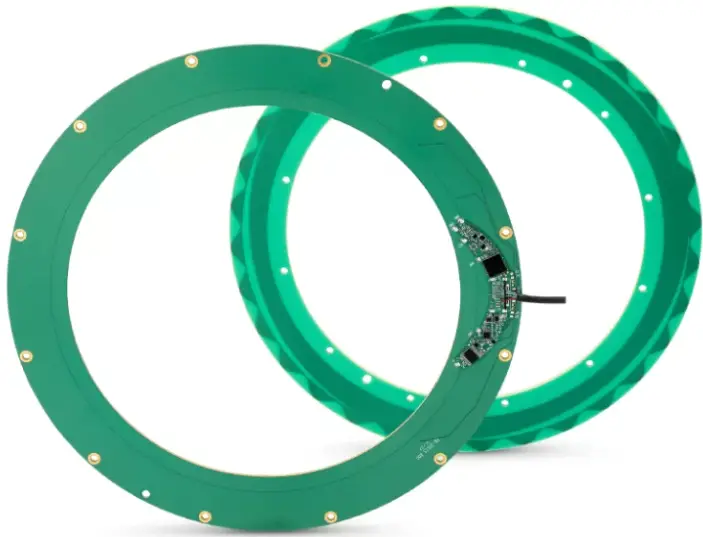
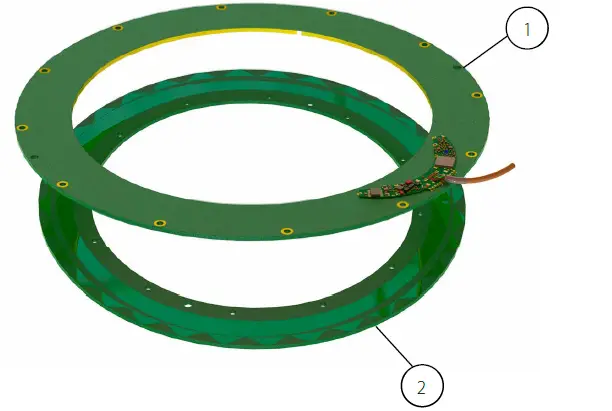
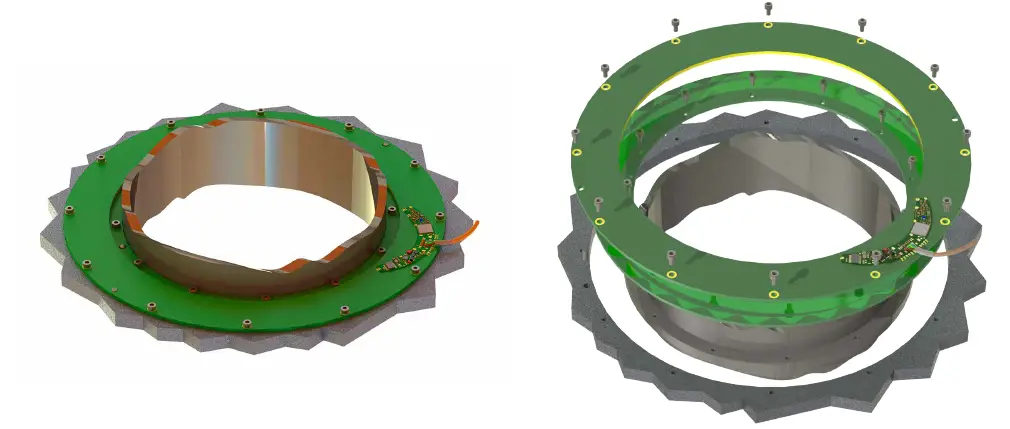
Prodotto finitoview
Sopraview
Il VLP-247 absolute position Electric Encoder™ è un sensore di posizione rotativo sviluppato per applicazioni esigenti. Attualmente è utilizzato in un'ampia gamma di applicazioni, tra cui difesa, sicurezza nazionale, robotica medica e automazione industriale. La tecnologia senza contatto Electric Encoder™ fornisce una misurazione precisa della posizione tramite la modulazione di un campo elettrico. Il VLP-247 Electric Encoder™ è un kit-encoder, ovvero il suo rotore e statore sono separati.
- Statore encoder
- Rotore dell'encoder
Disimballaggio – ordine standard
La confezione del VLP-247 standard contiene lo statore e il rotore dell'encoder.
Accessori opzionali:
- CNV-0003, convertitore da RS-422 a USB (con percorso di alimentazione 5V interno USB).
- NanoMIC-KIT-01, convertitore da RS-422 a USB. Configurazione e modalità operative tramite interfaccia SSi/BiSS.
- Dispositivo rotante RJ VLP-247
- DKIT-VLP-247-SG-S0, encoder SSi montato su maschera rotante, convertitore RS-422-USB e cavi.
- DKIT-VLP-247-IG-S0, encoder BiSS montato su dispositivo rotante, convertitore RS-422-USB e cavi.
Diagramma di flusso dell'installazione
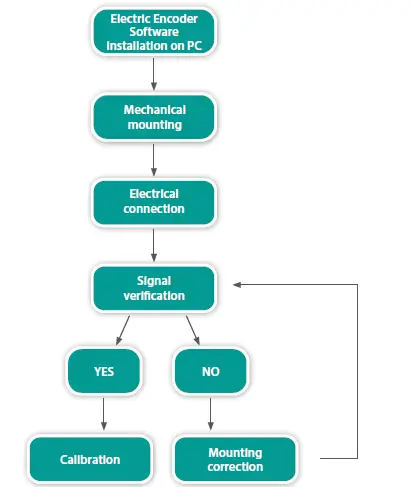
Installazione del software dell'encoder elettrico
Il software Electric Encoder Explorer (EEE):
- Verifica il montaggio corretto per un segnale adeguato amplitudine
- Calibrazione degli offset
- Configurazione generale e analisi del segnale
Questa sezione descrive i passaggi associati all'installazione dell'applicazione software EEE.
Requisiti minimi
- Sistema operativo: MS windows 7/10, (32/64 bit)
- Memoria: minimo 4 MB
- Porte di comunicazione: USB 2
- Windows .NET Framework, V4 minimo
Installazione del software
- Eseguire Electric Encoder™ Explorer file trovato su Netzer websito: Encoder Explorer Software Tools
- Dopo l'installazione verrà visualizzata l'icona del software Electric Encoder Explorer sul desktop del computer.
- Fare clic sull'icona del software Electric Encoder Explorer per iniziare.
Montaggio meccanico
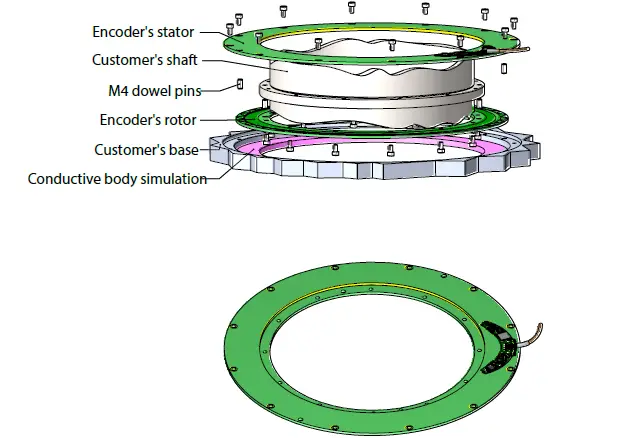
Montaggio dell'encoder – Installazione all'estremità dell'albero
Usi tipici dell'installazione dell'encoder
- Viti di montaggio Vite a testa cilindrica con esagono incassato 12xM2, 6 ciascuna per statore e rotore.
- Spine di centraggio di montaggio 4xØ2, 2 ciascuno per statore e rotore (non incluse con l'encoder).
Posizione relativa dello statore/del rotore dell'encoder
Per prestazioni adeguate, il traferro deve essere 1 mm ±0.3 mm
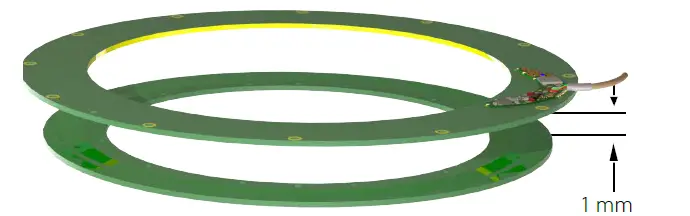
In un montaggio ottimale, il segnale ampI valori di litudine generati dall'encoder si troverebbero al centro dell'intervallo del grafico del segnale mostrato nel software Encoder Explorer (vedere il grafico di seguito). Questo può variare a seconda del tipo di encoder. Verificare il corretto montaggio del rotore con gli strumenti Encoder Explorer "Analizzatore di segnale" o "Processo di verifica del segnale".
Nota: per ulteriori informazioni leggere la sezione 7
Connessione elettrica
Questo capitolo rifviews i passaggi necessari per collegare elettricamente l'encoder con interfaccia digitale (SSi o BiSS-C).
Collegamento dell'encoder
L'encoder ha due modalità operative:
Posizione assoluta su SSi o BiSS-C
Questa è la modalità predefinita di accensione
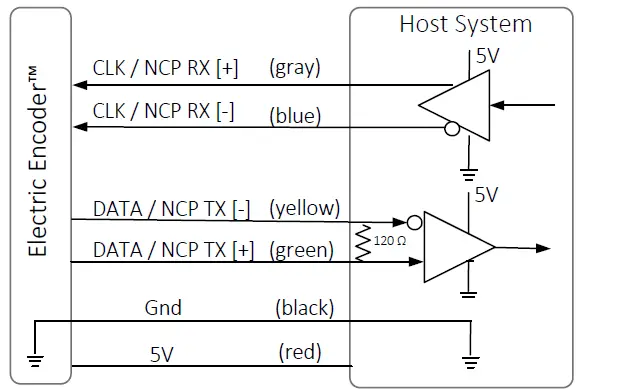
Codice colore fili interfaccia SSi / BiSS
| Orologio + | Grigio | Orologio |
| Orologio - | Blu | |
| Dati - | Giallo | Dati |
| Dati + | Verde | |
| Terra | Nero | Terra |
| +5V | Rosso | Alimentazione elettrica |
Parametri del segnale di uscita SSi / BiSS
| Codice di output | Binario |
| Uscita seriale | Differenziale RS-422 |
| Orologio | Differenziale RS-422 |
| Frequenza di clock | 0.1-5.0 MHz |
| Frequenza di aggiornamento della posizione | 35 kHz (opzionale - fino a 375 kHz) |
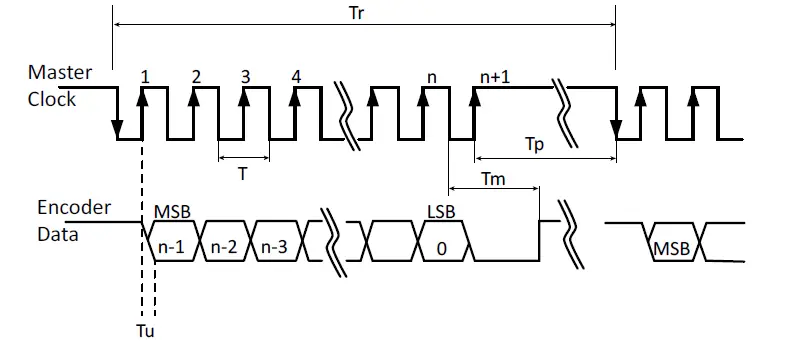
Interfaccia SSi digitale
L'interfaccia seriale sincrona (SSi) è uno standard di interfaccia seriale punto a punto tra un master (ad es. controller) e uno slave (ad es. sensore) per la trasmissione di dati digitali.
Opzione test integrato (BIT)
Il BIT indica un'anomalia critica nei segnali interni dell'encoder.
'0' – i segnali interni rientrano nei limiti normali, '1' – Errore
Il codice prodotto dell'encoder indica se l'encoder include BIT. Se nella PN non è indicato alcun BIT, non è presente alcun bit di errore aggiuntivo.
| Descrizione | Raccomandazioni | |
| n | Risoluzione della posizione | 12-20 |
| T | Periodo dell'orologio | |
| f= 1/t | Frequenza di clock | Frequenza 0.1-5.0 MHz |
| Tu | Tempo di aggiornamento bit | 90 nsec |
| Tp | Tempo di pausa | 26 – ∞μsec |
| Tm | Tempo di monoflop | 25 microsec |
| Tr | Tempo tra 2 richieste adiacenti | Tr > n*T+26 μsec |
| fr=1/Tr | Frequenza richiesta dati |
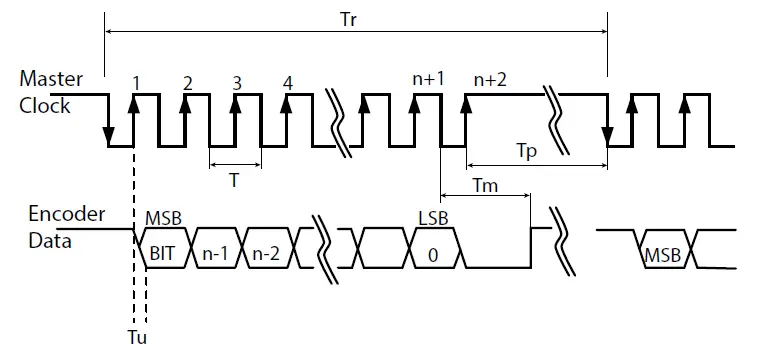
Interfaccia digitale BiSS-C
L'interfaccia BiSS - C è un protocollo sincrono seriale unidirezionale per la trasmissione di dati digitali in cui l'Encoder funge da "slave" trasmette i dati secondo l'orologio "Master". Il protocollo BiSS è progettato in modalità B e modalità C (modalità continua). L'interfaccia BiSS-C come SSi si basa sugli standard RS-422.
Opzione test integrato (BIT)
Il BIT indica un'anomalia critica nei segnali interni dell'encoder.
'1' – i segnali interni rientrano nei limiti normali, '0' – Errore
Il codice prodotto dell'encoder indica se l'encoder include BIT. Se nella PN non è indicato alcun BIT, il bit di errore è sempre 1.
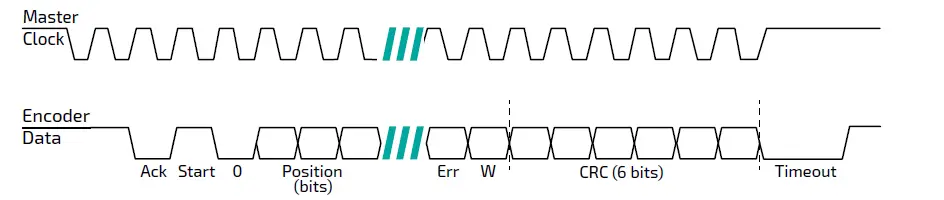
| Assegnazione dei bit per risoluzione del codificatore | Descrizione Predefinito | Lunghezza | |||||
| 17 bit | 18 bit | 19 bit | 20 bit | ||||
| 27 | 28 | 29 | 30 | Riconoscimento | Periodo durante il quale l'encoder calcola la posizione assoluta, un ciclo di clock | 0 | 1/orologio |
| 26 | 27 | 28 | 29 | Inizio | Segnale dell'encoder per la trasmissione dei dati di "avvio". | 1 | 1 bit |
| 25 | 26 | 27 | 28 | “0” | Seguace di bit "Start". | 0 | 1 bit |
| 8…24 | 8…25 | 8…26 | 8…27 | AP | Dati dell'encoder di posizione assoluta | Per risoluzione | |
| 7 | 7 | 7 | 7 | Errore | BIT (opzione Built In Test) | 1 | 1 bit |
| 6 | 6 | 6 | 6 | Avvisare. | Avviso (non attivo) | 1 | 1 bit |
| 0…5 | 0…5 | 0…5 | 0…5 | CRC | Il polinomio CRC per i dati di posizione, errore e avviso è: x6 + x1 + x0. Viene trasmesso prima MSB e poi invertito. Il bit iniziale e il bit "0" sono omessi dal calcolo CRC. | 6 bit | |
| Tempo scaduto | Intervallo tra i cicli sequenziali di richiesta di "avvio". | 25 μs | |||||
Modalità di configurazione su NCP (Netzer Communication Protocol)
Questa modalità di servizio fornisce l'accesso tramite USB a un PC che esegue l'applicazione Netzer Encoder Explorer (su MS Windows 7/10). La comunicazione avviene tramite Netzer Communication Protocol (NCP) su RS-422 utilizzando lo stesso set di fili. Utilizzare la seguente assegnazione pin per collegare l'encoder a un connettore di tipo D a 9 pin al convertitore RS-422/USB CNV-0003 o al NanoMIC.
Interfaccia encoder elettrico, tipo D 9 pin femmina
| Descrizione | Colore | Funzione | Pin n |
| Orologio SSi / RX NCP | Grigio | Orologio / RX + | 2 |
| Blu | Orologio / RX – | 1 | |
| Dati SSi / TX NCP | Giallo | Dati / TX – | 4 |
| Verde | Dati / TX + | 3 | |
| Terra | Nero | Terra | 5 |
| Alimentazione elettrica | Rosso | +5V | 8 |
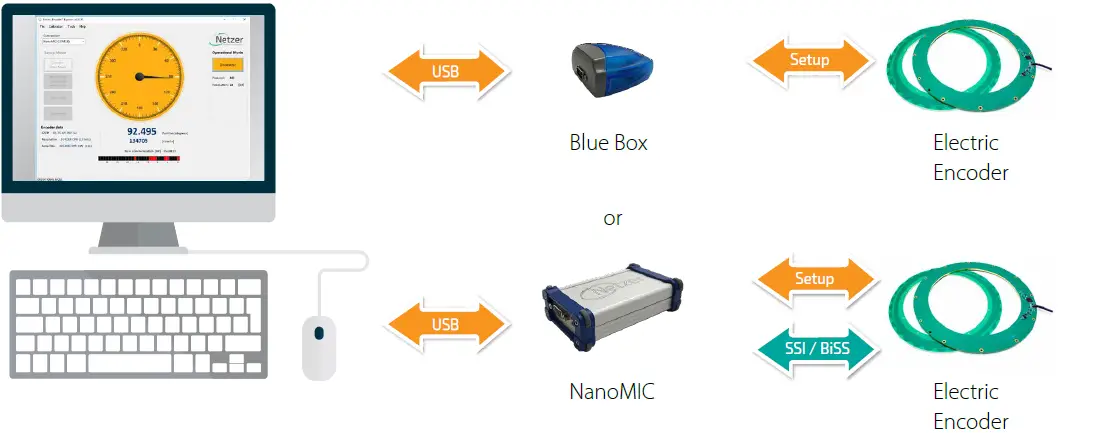
Collegare l'encoder Netzer al convertitore, collegare il convertitore al computer ed eseguire lo strumento software Electric Encoder Explorer
Collegamento elettrico e messa a terra
Osservare la seguente considerazione sulla messa a terra:
- Per impostazione predefinita, la schermatura del cavo è elettricamente fluttuante (non collegata).
- Si consiglia vivamente di mantenere i cavi PWM del motore elettricamente schermati e/o lontani dall'encoder.
Nota: È necessaria un'alimentazione da 4.75 a 5.25 V CC
Verifica del segnale
Avvio di Encoder Explorer
Assicurati di completare correttamente le seguenti attività:
- Montaggio meccanico
- Collegamento elettrico all'encoder
- Encoder Esplora l'installazione del software
Eseguire lo strumento Encoder Explorer (EE)
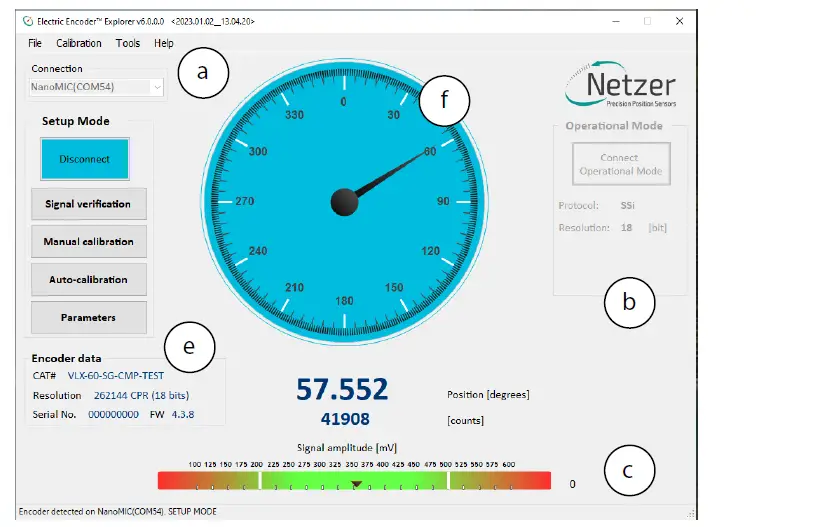
Garantire una corretta comunicazione con l'encoder: (modalità di configurazione per impostazione predefinita). Il quadrante di posizione dell'encoder è di colore blu quando si è in modalità di configurazione, tramite il NanoMic o il BlueBox (a). Si noti che la modalità operativa non è disponibile tramite BlueBox (b). Il segnale ampLa barra di livello indica se il segnale rientra nella tolleranza accettabile (c). Si noti che prima di eseguire il processo di verifica del segnale la barra potrebbe indicare un segnale fuori tolleranza (d). I dati dell'encoder vengono visualizzati nell'area dati dell'encoder (n. CAT, n. seriale) (e). Il display del quadrante di posizione risponde alla rotazione dell'albero (f).

È importante eseguire il processo di verifica del segnale prima della calibrazione dell'encoder per garantire prestazioni ottimali.
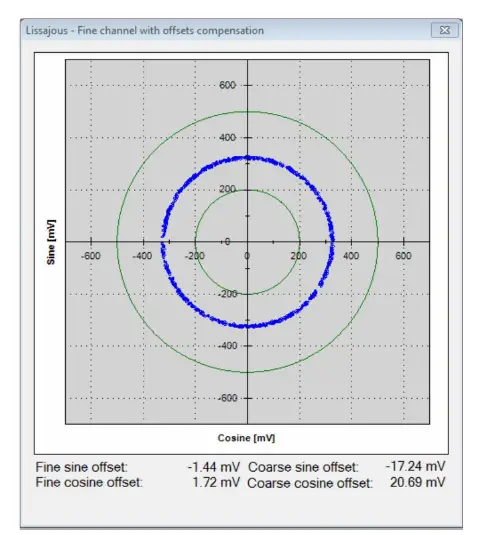
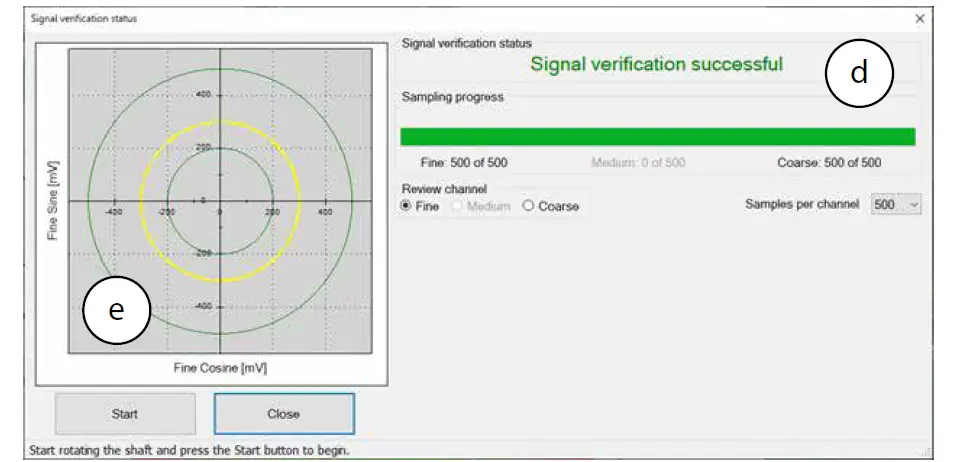
Processo di verifica del segnale
Il processo di verifica del segnale assicura che l'encoder sia montato correttamente e fornisca un buon segnale amplitudini. Ciò viene eseguito raccogliendo dati grezzi dei canali fini e grossolani durante la rotazione.
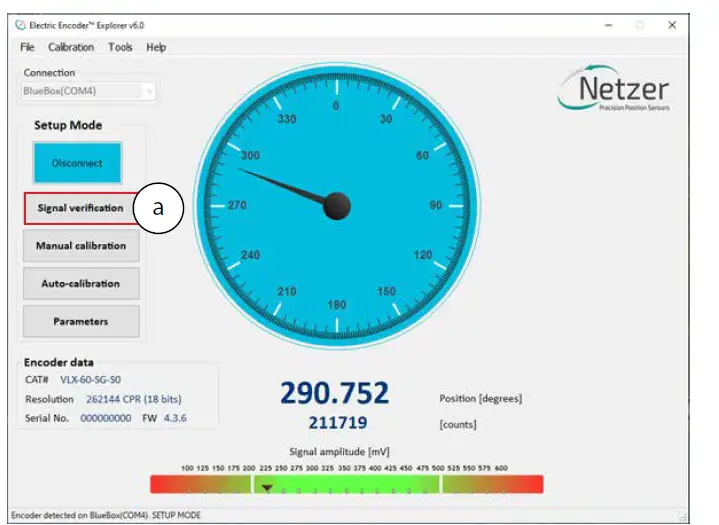
- Selezionare nella schermata principale (a).
- Selezionare avviare il processo (b).
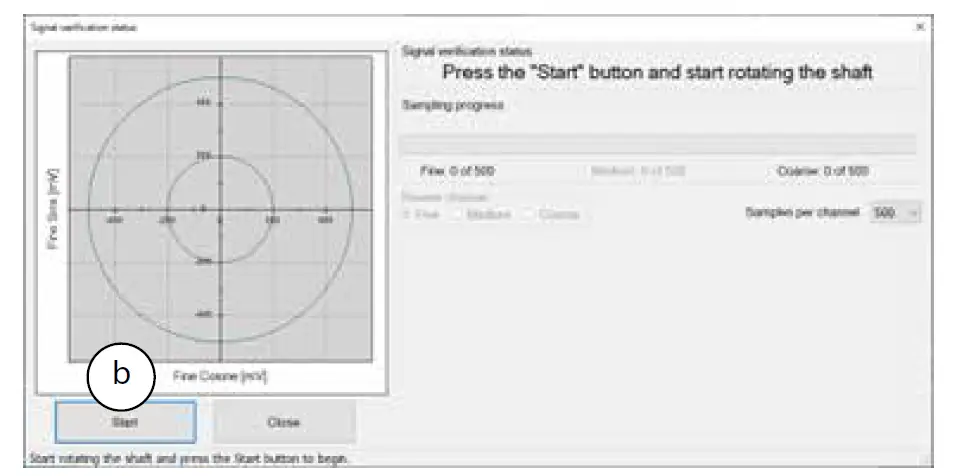
- Ruotare l'albero per raccogliere i dati dei canali fini e grossolani (c).

Se il processo ha esito positivo, apparirà lo stato “Verifica del segnale riuscita” (d). Il 'ampcerchio di latitudine' sarebbe centrato tra i due cerchi verdi, preferibilmente al centro della tolleranza (e).
Si noti tuttavia che il montaggio dell'encoder con tolleranze meccaniche estreme potrebbe causare il ampcerchio di litude deve essere sfalsato dal centro esatto della posizione nominale. Se il segnale è fuori tolleranza la Notifica di errore “Amplitude è inferiore/superiore al limite min/max di XXX” (g). Inoltre, lo stato “Verifica del segnale non riuscita – eseguire la calibrazione amplitude” apparirebbe in alto (h).
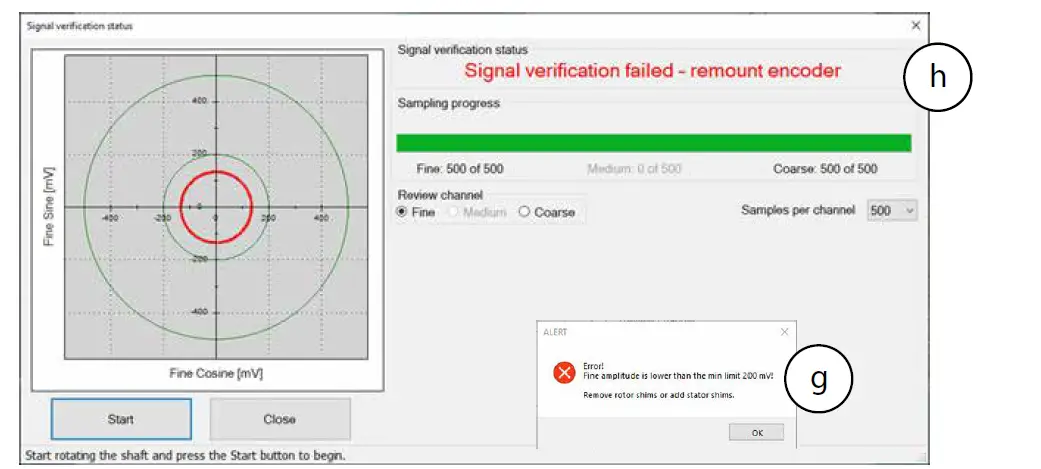
- Interrompere il processo e rimontare l'encoder, assicurandosi che non vengano superate le tolleranze di installazione meccanica, rimuovendo o aggiungendo spessori secondo necessità.
- Ripetere il processo di verifica del segnale dopo il rimontaggio.
Una volta completato con successo il processo di verifica del segnale, procedere alla fase di calibrazione dell'encoder, Sezione 13
Calibrazione
È importante che a ogni installazione dell'encoder, il processo di verifica del segnale venga completato prima di tentare la calibrazione dell'encoder. Per gli encoder con FW 4 versione 4.1.3 o superiore, è possibile selezionare un processo di calibrazione completamente automatizzato o un processo di calibrazione manuale fase per fase.
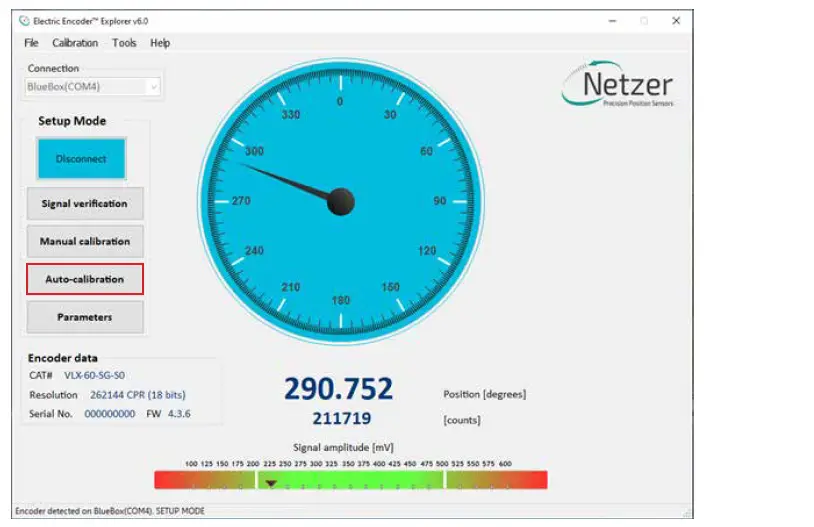
Auto-calibrazione
La calibrazione automatica è supportata dagli encoder con FW 4 versione 4.1.3 o superiore. Per questi encoder viene visualizzato un ulteriore pulsante "Auto-calibrazione".
Processo di autocalibrazione
Il processo di autocalibrazione consiste in tre stages:
- Jitter test: valuta il rumore elettrico per i canali dell'encoder Fine, Medium e Coarse. Durante il test di jitter, l'albero deve essere fermo.
Attenzione! Il criterio Pass/Fail del test Jitter è conforme a criteri di fabbrica molto rigidi e il suo fallimento interromperebbe il processo di calibrazione automatica.
Tuttavia, il test manuale del jitter come parte del processo di calibrazione manuale nella sezione 13.4, consentirebbe all'utente di decidere se il jitter è accettabile per le sue esigenze. - Calibrazione dell'offset – esegue la calibrazione dell'offset, l'albero deve ruotare continuamente.
- Calibrazione Absolute Position (AP) – esegue Coarse Amplitude Alignment (CAA) e Medio Amplitude Alignment (MAA).
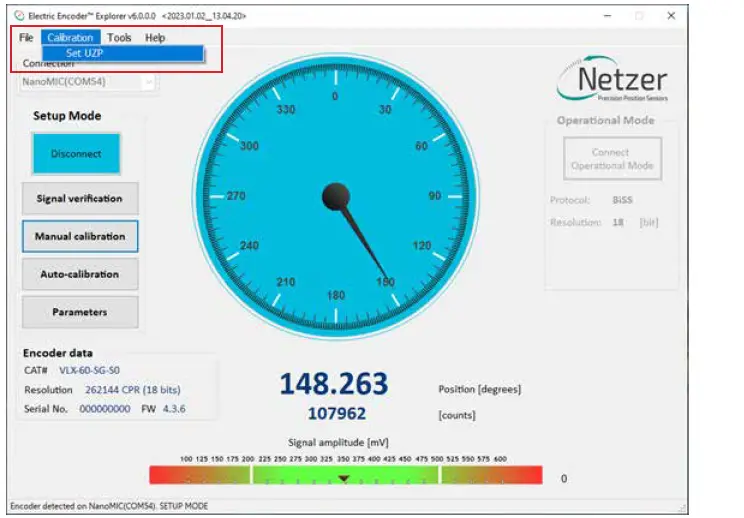
Durante il processo di autocalibrazione, la posizione zero dell'encoder rimane nella posizione zero predefinita in fabbrica per i nuovi encoder. È possibile impostare il punto zero tramite la barra dei menu in alto, selezionando la scheda "Calibrazione" e facendo clic su "Imposta UZP" come definito nella sezione 13.3.
Esecuzione della calibrazione automatica
Premere il pulsante .
Si apre la finestra principale di calibrazione automatica.
- Selezionare l'intervallo di misurazione appropriato applicabile alla propria applicazione (a).
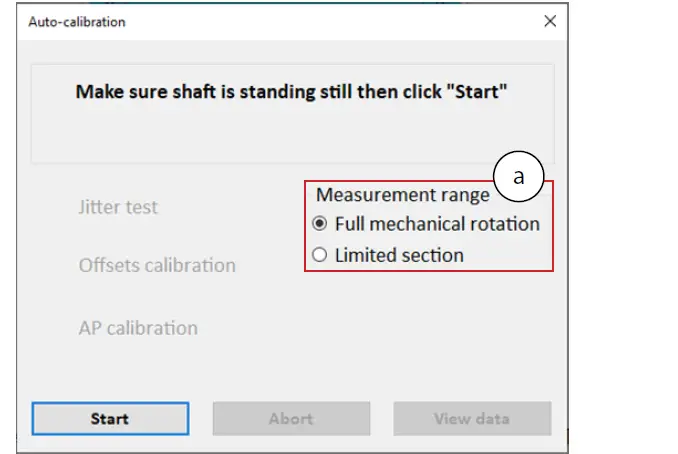
- Assicurarsi di tenere fermo l'albero e premere il
Verrà eseguito il test Noise e, una volta completato con successo, l'etichetta "Noise test" verrà contrassegnata con un segno di spunta verde. La calibrazione Offset verrà avviata automaticamente al completamento del test Noise. Questa calibrazione richiede che l'albero venga ruotato in modo continuo. La calibrazione AP verrà avviata automaticamente al completamento della calibrazione Accuracy. Continuare a ruotare l'albero in questa fase fino al completamento della calibrazione AP e al ripristino dell'encoder. Una volta terminato il ripristino, il processo di auto-calibrazione è terminato con successo.
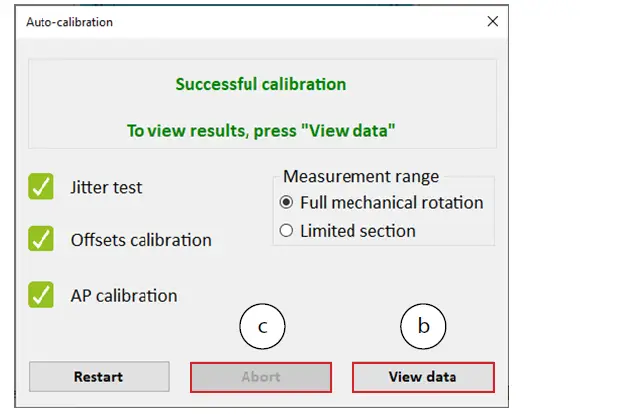
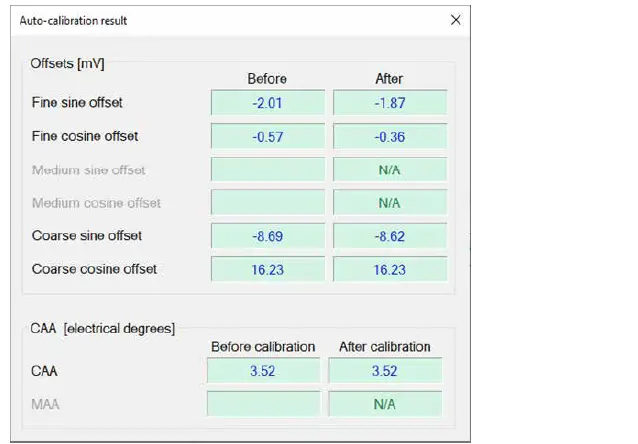
L'utente può review i risultati della calibrazione facendo clic suView pulsante dati> (b).
È sempre possibile interrompere il processo di calibrazione automatica facendo clic su pulsante (c).
Errori di calibrazione automatica
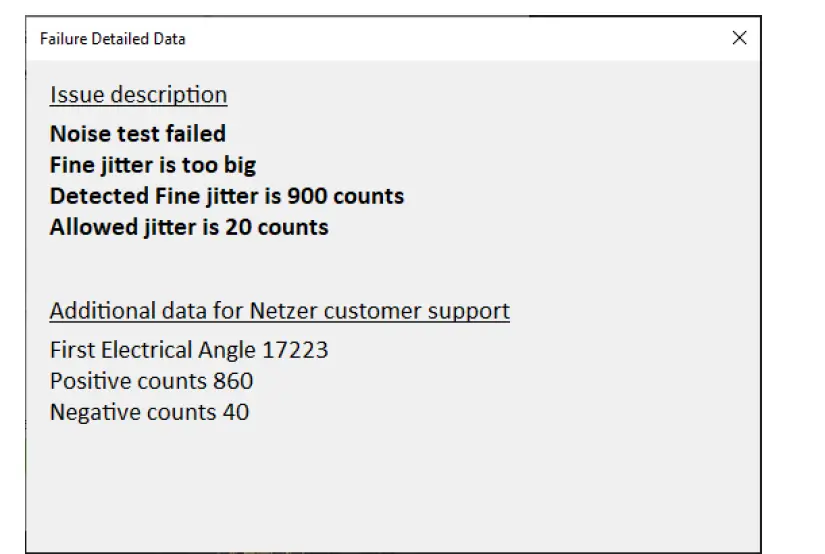
Se un test fallisce (ad esample il test del rumore) – il risultato sarà contrassegnato con una X rossa.
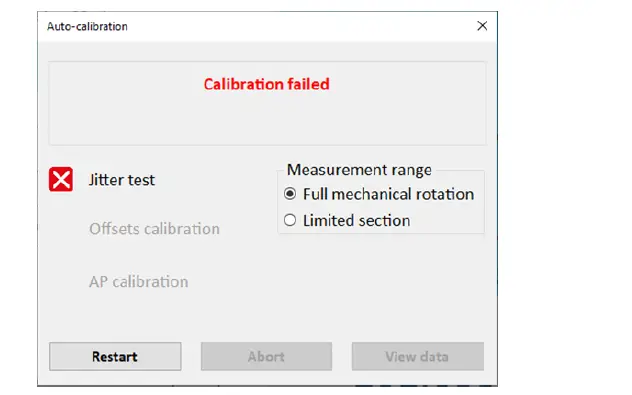
Se il processo di calibrazione fallisce, verranno visualizzate le raccomandazioni correttive, corrispondenti all'elemento che ha fallito il test.
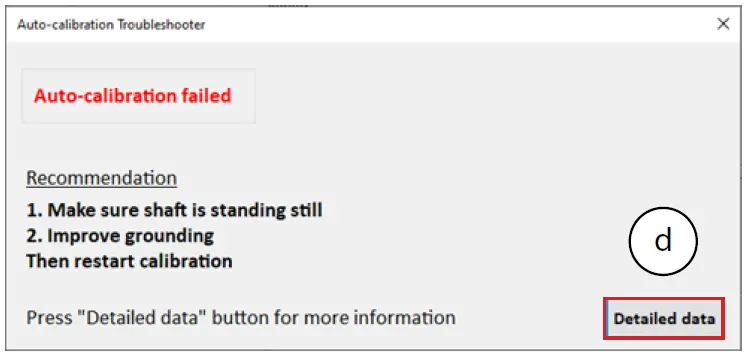
È possibile riview informazioni dettagliate sull'errore, facendo clic sul pulsante pulsante (d).
Impostazione della posizione zero dell'encoder
- Selezionare una delle opzioni per l'impostazione del punto zero e fare clic .
È possibile impostare la posizione corrente o ruotare l'albero in qualsiasi altra posizione da impostare come punto zero.

È anche possibile impostare il punto zero tramite la barra dei menu in alto, selezionando la scheda "Calibrazione" e facendo clic su "Imposta UZP".
Prova di jitter
Il test del jitter viene utilizzato per valutare il livello di rumore elettrico. Il jitter comune dovrebbe aumentare di +/- 3 conteggi; un jitter più elevato può indicare rumore del sistema e richiederebbe una migliore messa a terra o schermatura della sorgente di rumore elettrico.
- Selezionare la scheda "Calibrazione" e fare clic su "Test Jitter"

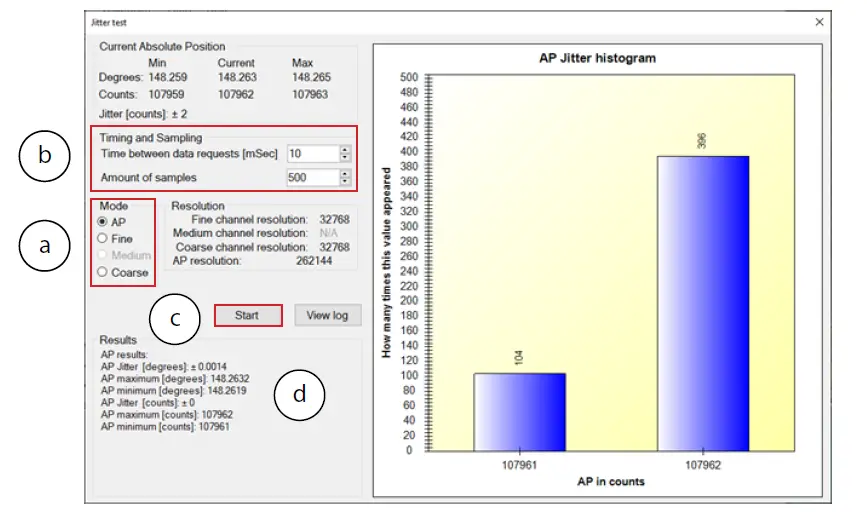
- Selezionare la modalità test Jitter (a).
- Imposta i tempi e Sampparametri ling (b).
- Clic pulsante (c) e controllare se i risultati (d) rientrano nelle tolleranze accettabili per l'applicazione prevista.
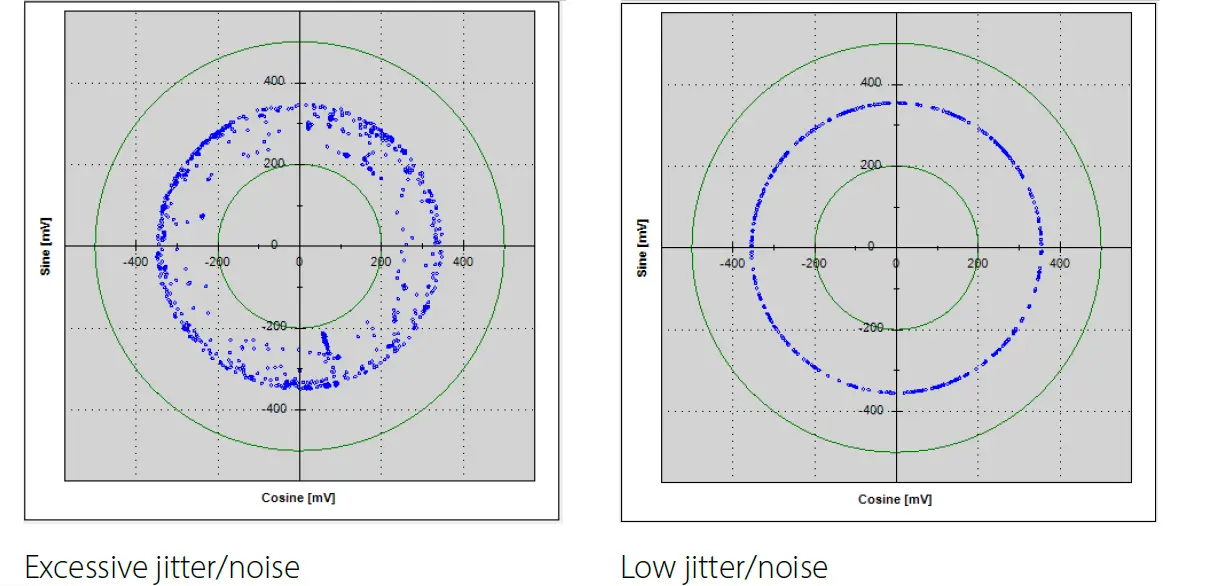
Un'altra indicazione di eccessivo jitter/rumore quando i punti blu nel segnale ampil cerchio di latitudine non è distribuito uniformemente su un cerchio sottile come appare di seguito.
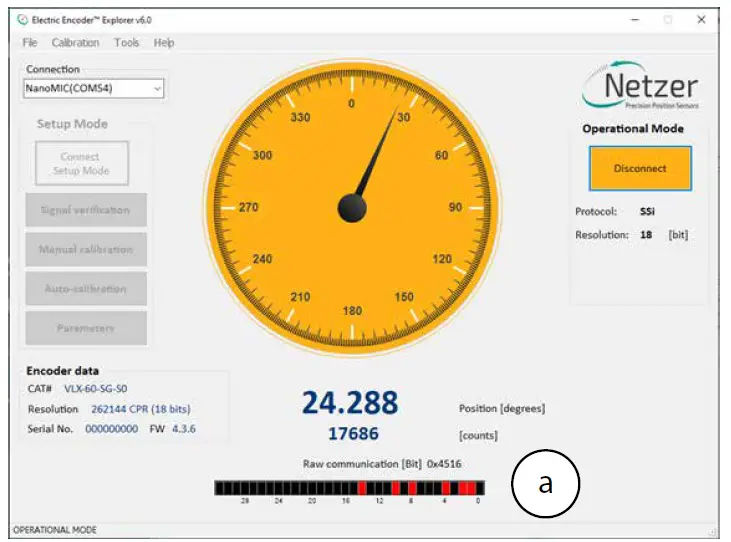
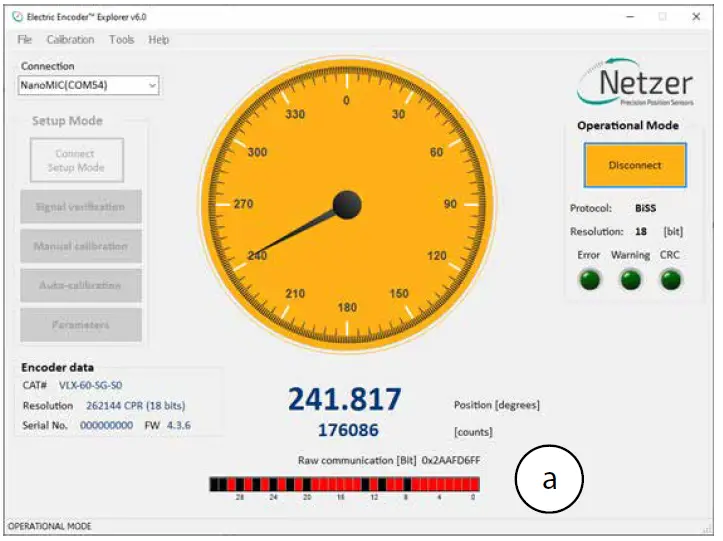
Modalità operativa
SSi/BiSS
L'indicazione della modalità operativa dell'interfaccia dell'encoder SSi/BiSS è disponibile utilizzando il NanoMIC per connettersi all'encoder. In modalità operativa il colore del quadrante di posizione è arancione.
Per ulteriori informazioni leggi NanoMIC su Netzer websito
La modalità operativa utilizza l'interfaccia SSi/BiSS con una frequenza di clock di 1 MHz. Il quadrante della posizione dell'encoder è colorato di arancione quando è in modalità operativa. La barra sotto il quadrante è l'output di parola binaria corrispondente per la posizione corrente dell'albero (a).
Protocollo SSi
Protocollo BiSS
Sede aziendale
ISRAELE
Netzer Sensori di posizione di precisione ACS Ltd.
Zona industriale di Misgav, casella postale 1359
DN Misgav, 2017400
- Tel: +972 4 999 0420
U.S.A.
Netzer Precision Position Sensors Inc.
Via principale 200, Salem
NH03079
- Tel: +1 617 901 0820
- www.netzerprecision.com
Copyright © 2024 Netzer Precision Position Sensors ACS Ltd. Tutti i diritti riservati.
Documenti / Risorse
 |
Kit encoder rotativo ad albero cavo Netzer Precision VLP-247 Encoder [pdf] Guida utente VLP-247, VLP-247, VLP-247 Kit encoder rotativo ad albero cavo Encoder, VLP-247, Kit encoder rotativo ad albero cavo Encoder, Kit encoder rotativo ad albero Encoder, Kit encoder rotativo Encoder, Kit encoder Encoder, Kit encoder, Encoder |



